

1. 서 론
2. 대상 풍력터빈
2.1 공력특성
2.2 정상상태응답
3. 제어 알고리즘
3.1 정격풍속 이전 최대 출력 제어
3.2 정격풍속 이후 출력 제한 제어
3.3 타워 댐퍼
4. 연구 결과
5. 결 론
기호설명
 : 로터 회전 단면적 [
: 로터 회전 단면적 [ ]
]
 : 기어 비 [
: 기어 비 [ ]
]
 : 전기적 출력 [
: 전기적 출력 [ ]
]
 : 로터 직경 [
: 로터 직경 [ ]
]
 : 나셀 전후방향 변위 [
: 나셀 전후방향 변위 [ ]
]
 : 나셀 전후방향 속도 [
: 나셀 전후방향 속도 [ ]
]
 : 나셀 전후방향 가속도 [
: 나셀 전후방향 가속도 [ ]
]
그리스 문자
 : 피치 각 [
: 피치 각 [ ]
]
 : 우수 피치각 [
: 우수 피치각 [ ]
]
 : 타워 댐퍼 보상 피치각 [
: 타워 댐퍼 보상 피치각 [ ]
]
 : 제어 입력 [
: 제어 입력 [ ]
]
 : 밀도 [
: 밀도 [ ]
]
 : 풍속 [
: 풍속 [ ]
]
 : 로터 회전속도 [
: 로터 회전속도 [ ]
]
 : 로터 회전속도 기준 값 [
: 로터 회전속도 기준 값 [ ]
]
상첨자
 : 피치 각 지령 [
: 피치 각 지령 [ ]
]
 : 토크 지령 [
: 토크 지령 [ ]
]
하첨자
 : 부가 댐핑계수 [
: 부가 댐핑계수 [ ]
]
 : 타워 구조 댐핑계수 [
: 타워 구조 댐핑계수 [ ]
]
 : 출력계수 [
: 출력계수 [ ]
]
 : 최대 출력계수 [
: 최대 출력계수 [ ]
]
 : 추력계수 [
: 추력계수 [ ]
]
 : 추력계수 [
: 추력계수 [ ]
]
 : 타워 댐퍼 게인 [
: 타워 댐퍼 게인 [ ]
]
 : 타워 전후방향 강성 계수 [
: 타워 전후방향 강성 계수 [ ]
]
 : 타워 등가 질량 [
: 타워 등가 질량 [ ]
]
 : 공력 토크 [
: 공력 토크 [ ]
]
 : 발전기 토크 [
: 발전기 토크 [ ]
]
1. 서 론
풍력터빈의 제어기술은 사람의 두뇌에 해당하는 기술로서, 크게 출력제어 기술과 하중저감 제어기술로 나눌 수 있다. 출력제어 기술은 정격풍속 이전에서 사용되는 최대 출력점 추종제어(MPPT: Maximum Power Point Tracking)와 정격풍속 이후에서 사용되는 집단 피치제어(CPC: Collective Pitch Control)로 나눠진다. 또한 하중저감 제어기술은 크게 풍력터빈의 타워 전후방향 모멘트를 저감하는 타워 댐퍼(Tower Damper), 블레이드에 작용하는 불 평형 하중을 저감하는 개별 피치제어(IPC: Individual Pitch Control), 그리고 추력이 최대가 되는 정격 이하 구간에서 미리 피치제어를 통해 하중을 저감하는 피크 쉐이빙(Peak Shaving) 제어 방법 등이 있다1,2).
풍력터빈의 경제성을 높이기 위한 풍력터빈 대형화는 풍력터빈의 로터직경(Rotor Diameter)의 증가로 인해 바람으로부터 받게 되는 하중이 증가하게 되며, 따라서 20년 이상의 설계수명을 보장하기 위해, 최근 하중저감 제어기술에 대한 관심이 높아지고 있다3).
이 중 타워 댐퍼는 풍하중에 의한 타워의 전후방향 진동운동의 감쇠를 피치제어를 통해 증가시켜 타워진동을 저감하는 제어기법으로 일반적으로 나셀에 설치된 가속도계로부터 나셀 가속도 신호를 받아들여 적절한 피치지령(Pitch Command)값을 계산하고, 출력제어를 위한 집단 피치제어 피치지령값(Pitch Command)에 이를 더하여 최종 피치지령을 내는 것으로 실제 제어기 설계가 이루어진다4).
타워 댐퍼를 이용한 하중 저감 제어 알고리즘은 타워 전후방향 하중을 손상 등가하중(DEL: Damage Equivalent Load)으로 풍력터빈에 따라 약 5~20% 이상 저감할 수 있는 것으로 알려져 있다4,5,6,7). 남윤수 등은 NREL 5MW 연구용 풍력터빈을 이용하여 나셀 가속도 신호를 받아들여 이를 적분하여 속도 신호로 변환한 후 비례 게인(Proportional Gain)을 적절히 적용하여 피치지령을 계산하는 타워 댐퍼를 설계하고 동적 시뮬레이션으로 그 결과를 검증하였다5). 검증결과 18m/s 의 평균풍속을 갖는 난류강도 17%의 바람에 대해 타워 뿌리에서의 전후방향 모멘트 값이 약 14% 정도 저감되는 것으로 제시하였다. 또한 김관수 등은 유사한 타워 댐퍼 알고리즘을 MW 풍력터빈보다 로터 회전속도가 약 수 배 정도 빠른 100 kW 상용 중형 풍력터빈에 적용하였으며, 역시 동적 시뮬레이션으로 검증한 결과 타워 뿌리에서의 전후방향 모멘트 값을 최대 32% 감소시킬 수 있음을 제시하였다6). 또한 Oh et al. (2015)은 타워 댐퍼 알고리즘을 NREL 5 MW 부유식 풍력터빈에 적용하여, 나셀 각 가속도 성분을 피드백 받아 이를 적분한 후 비례게인을 적용하여 피치지령을 계산하는 것으로 하중저감 제어기를 적용하여, 하중감소를 확인하였다7).
Shan은 최근 연구에서 타워 댐퍼에 PID 제어기를 적용하고, Nelder Mead 함수 최소화 알고리즘을 이용하여, 하중 저감을 위한 PID 게인값을 찾는 방법으로 하중저감 제어기를 제안하였다. 또한 로터 회전속도의 3p 성분으로 발생하는 타워 하중을 저감하기 위하여 2차 타워 고유 주파수와 1차 동력 전달축 고유 주파수에 노치필터를 사용하였고 하중저감 효과를 파워스펙트럼 밀도를 통하여 확인하였다8,9).
하지만 기존의 타워 댐퍼 제어방법은 일반적으로 단일 풍속에 대해서 설계되며4,5,6,7), 또한 타워 댐퍼 적용 후 응답 특성이 풍속에 따라 다르기 때문에 피치 응답을 통한 게인 스케줄링(Gain Scheduling)을 적용하게 된다. 하지만 상대적으로 느린 피치 응답의 영향으로 게인 스케줄링의 효과가 잘 나타나지 않는 문제점을 갖고 있다10).
따라서 본 논문에서는 기존 타워 댐퍼의 성능을 개선시키기 위한 새로운 방법으로 추력 에 대한 피치 민감도 스케줄링을 적용하고자 하였다. 또한 타워 댐퍼 알고리즘에 의한 피치각 보상 응답속도를 높이기 위하여 기존의 P 제어나 PID 제어 방법이 아닌 PI 제어 방법을 적용하였다.
개선된 타워 댐퍼 알고리즘의 효과를 검증하기 위하여 타워뿌리(Tower Root) 부분에 걸리는 손상등가하중, 평균발전량, 발전량 표준편차를 성능지표로 설정하고 기존 P 제어에 의한 타워 댐퍼 알고리즘을 적용할 때의 결과와 비교분석을 수행하였다.
2. 대상 풍력터빈
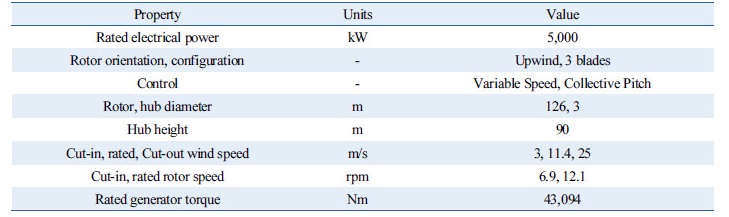
본 연구에 사용된 대상 풍력 터빈은 미국재생에너지 연구소(NREL: National Renewable Energy Laboratory)의 5 MW 연구용 해상 풍력터빈 모델이다. 대상 풍력터빈의 제원은 아래 Table 1에 제시되어 있으며 NREL의 기술 보고서에 제시된 풍력터빈의 상세제원을 이용하여 다물체 동력학 기반 공탄성 해석 프로그램인 DNV-GL bladed로 모델링하였다.
2.1 공력특성
풍력터빈은 블레이드의 기하학적 형상, 피치각, 풍속 및 블레이드 회전속도에 의해 공기역학적 특성이 변화하며, 공기역학적 특성을 로터 회전방향으로 힘에 의한 출력과 하류 방향으로의 추력으로 나타낸다면, 1차원 운동량 이론(One-dimensional momentum theory)에 의하여 각각 식 (1)과 (2)로 나타낼 수 있다.
 (1)
(1)
추력은 풍력터빈을 마주하는 바람에 의해 풍력터빈에 가해지는 힘으로서 과도한 추력은 풍력터빈의 날개뿌리와 타워뿌리 하중을 증가시켜 풍력터빈의 수명을 감소시키는 원인이 된다. 따라서 출력과 함께 풍력터빈 설계 시 반드시 고려되어야 하는 요소이다.
 (2)
(2)
Fig. 1은 NREL5MW 풍력터빈의 출력계수( ,Power Coefficient)와 추력계수(
,Power Coefficient)와 추력계수( , Thrust Coefficient) 그래프이며 풍력터빈 시스템의 비선형성을 보여준다. 출력계수와 추력계수는 선단속도비(
, Thrust Coefficient) 그래프이며 풍력터빈 시스템의 비선형성을 보여준다. 출력계수와 추력계수는 선단속도비( , Tip Speed Ratio)와 피치각(
, Tip Speed Ratio)와 피치각( , Pitch Angle)에 따라 다른 값을 가지고 있다. 선단속도비는 풍속과 풍력터빈 날개 끝단 선속도(Blade Tip Speed)의 비로서 식 (3)과 같이 나타낸다. 풍속과 날개 회전 속도에 따라서 공력성능이 달라짐을 알 수 있다.
, Pitch Angle)에 따라 다른 값을 가지고 있다. 선단속도비는 풍속과 풍력터빈 날개 끝단 선속도(Blade Tip Speed)의 비로서 식 (3)과 같이 나타낸다. 풍속과 날개 회전 속도에 따라서 공력성능이 달라짐을 알 수 있다.

 (3)
(3)
Fig. 1에서 살펴보면, 대상 풍력터빈의 출력계수는 피치각 –0.5°, 선단속도비 7.8에서 최댓값 0.486을 갖는 것을 알 수 있으며, 이때의 피치각, 선단속도비, 출력계수를 각각 우수 피치각( , Fine pitch), 최적선단속도비(
, Fine pitch), 최적선단속도비( , Optimal Tip Speed Ratio ), 최대 출력 계수(
, Optimal Tip Speed Ratio ), 최대 출력 계수( , Maximum Power Coefficient)라고 한다.
, Maximum Power Coefficient)라고 한다.
2.2 정상상태응답
Fig. 2는 GH-bladed를 통하여 계산한 대상 풍력터빈의 로터 스피드, 피치각, 발전기토크, 전기적 출력 그리고 추력의 정상상태 응답을 나타낸다. Fig. 2를 살펴보면 정격풍속인 11.4 m/s를 기점으로 풍력터빈의 운전이 달라지는 것을 알 수 있다. 즉, 정격풍속 이전에는 풍력터빈은 공력성능을 최대로 가져가기 위해 우수피치각을 유지하며 최대 출력점 추종제어를 위한 발전기 반력토크 제어를 수행한다. 또한 정격 풍속이후에는 정격토크를 유지하고, 정격 출력을 제한하기 위한 피치 제어가 수행된다. 추력은 풍속에 따라 증가하다가 정격풍속 이후 피치 제어로 인해 감소한다.

3. 제어 알고리즘
풍력터빈 시스템은 바람의 단위시간 당 운동에너지를 정격출력 이하에서 최대한 회수 하면서 구조물에 가해지는 기계적 하중의 크기는 최소화해야 한다. Fig. 3은 본 연구에 적용된 NREL 5 MW 풍력터빈의 제어 구조이다.

풍력터빈의 발전기 속도를 피드백받아 발전기 토크 명령이나 블레이드 피치명령을 내는 두 개의 피드백 루프는 풍력터빈의 기본 출력제어인 토크제어와 피치제어를 나타낸다. 모드 스위치(Mode Switch)는 제어 인자를 통하여 피치제어기, 토크제어기의 사용 여부, 즉 적절한 제어구간을 판단한다.
3.1 정격풍속 이전 최대 출력 제어
바람으로부터 에너지를 최대로 회수하기 위해서 식 (1)의 인자 중에서  의 값을 최대로 가져야 함을 알 수 있다. 이때, 풍속은 식 (3)와 같이 표현되며 공력토크와 발전기 반력 토크
의 값을 최대로 가져야 함을 알 수 있다. 이때, 풍속은 식 (3)와 같이 표현되며 공력토크와 발전기 반력 토크  관계를 고려하면 발전기 토크는 식 (4)와 같이 나타낼 수 있다.
관계를 고려하면 발전기 토크는 식 (4)와 같이 나타낼 수 있다.
 (4)
(4)
 (5)
(5)
식 (5)의  는 풍력터빈마다 가지는 고유한 상수 값이고 정격 풍속 이전에는
는 풍력터빈마다 가지는 고유한 상수 값이고 정격 풍속 이전에는  값을 이용하여, 식 (4)를 만족시키는 로터 회전속도에 따른 토크가 발전기 축에 부가된다면, 풍력터빈은 최대 출력계수를 유지할 수 있다. 따라서 정격 풍속 이전 구간에서는 풍력터빈 날개는 우수 피치각으로 고정하고 식 (4)와 같은 관계를 가지는 회전속도 대비 토크스케줄을 사용하여 토크 제어를 수행한다4,11).
값을 이용하여, 식 (4)를 만족시키는 로터 회전속도에 따른 토크가 발전기 축에 부가된다면, 풍력터빈은 최대 출력계수를 유지할 수 있다. 따라서 정격 풍속 이전 구간에서는 풍력터빈 날개는 우수 피치각으로 고정하고 식 (4)와 같은 관계를 가지는 회전속도 대비 토크스케줄을 사용하여 토크 제어를 수행한다4,11).
3.2 정격풍속 이후 출력 제한 제어
풍력터빈은 소음문제, 발전기용량제한, 시스템의 안정성 등의 이유로 출력을 제한하게 된다. 정격풍속 이후에서 발전기 토크는 정격 토크로 유지되며 블레이드 액츄에이터를 사용하여 피치각을 증가시켜 공력효율( )을 감소시키는 방법으로 풍력터빈의 에너지 회수 효율을 조절한다. 피치 응답 속도를 빠르게 가져가기 위하여 식 (6)과 같이 PI 제어를 사용하였다. 또한 피치 변화 응답 민감도는 풍속에 따라 바뀌는데 피치 민감도를 풍속에 따라 균일하게 가져가기 위하여 게인 스케줄링(Gain Scheduling,
)을 감소시키는 방법으로 풍력터빈의 에너지 회수 효율을 조절한다. 피치 응답 속도를 빠르게 가져가기 위하여 식 (6)과 같이 PI 제어를 사용하였다. 또한 피치 변화 응답 민감도는 풍속에 따라 바뀌는데 피치 민감도를 풍속에 따라 균일하게 가져가기 위하여 게인 스케줄링(Gain Scheduling,  N
N
 ) 기법을 사용하였다4).
) 기법을 사용하였다4).
 (6)
(6)
3.3 타워 댐퍼
난류강도가 섞인 바람 속에서 풍력터빈은 최대 출력 제어를 수행하기 위해서 블레이드 회전 반복 운동을 하게 되어 최종적으로 타워의 전후 방향 진동에 영향을 미친다. 이것은 블레이드가 마주하게 되는 상대 풍속에 영향을 미치고 공력 토크를 통해 피치 제어에 피드백 되어 작용하게 되어 결과적으로 터빈 구조의 안정성에 악영향을 준다10). 따라서 타워의 전후뱡향 운동 감쇠비를 증대시켜 타워 구조물의 기계적 하중을 경감시켜야 한다9).
타워의 전후방향 운동은 아래 식 (7)과 같이 단순 2차 시스템으로 근사적으로 모델링할 수 있다9).
 (7)
(7)
식 (6)에서  은 풍력터빈 피치 변화에 따른 추가적으로 발생한 추력임으로
은 풍력터빈 피치 변화에 따른 추가적으로 발생한 추력임으로  으로 나타낼 수 있고
으로 나타낼 수 있고  의 피드백을 사용하면 식 (8)과 같은 피치각 보상으로 타워 전후방향 감쇠비를 증대시킬 수 있다9).
의 피드백을 사용하면 식 (8)과 같은 피치각 보상으로 타워 전후방향 감쇠비를 증대시킬 수 있다9).
 (8)
(8)
Fig. 4의 왼쪽 그림은 기존에 사용해왔던 타워 댐퍼 알고리즘으로써 타워 전후 방향 가속도 신호를 피드백 받아 적분하여 속도신호로 변환 후 추가적인 피치각을 보상함으로써 타워 전후 방향 굽힘 모멘트를 저감시킬 수 있었다.

Fig. 4의 오른쪽 그림은 본 논문에서 제시하는 타워 댐퍼 알고리즘으로서 일반적으로 알려진 타워 댐퍼 알고리즘과 달리 피치각 변화에 따른 추력변화 민감도를 일정하게 가져가기 위해, 추력 민감도 스케줄링을 적용하였으며, 또한 타워 댐퍼 알고리즘에 의한 피치각을 세밀하게 보상하기 위하여 기존에 알려진 P 제어 방법이 아닌 PI제어 방법을 적용하였다. Fig. 5는 본 논문에서 적용한 피치각 변화에 따른 추력민감도 스케줄링을 나타낸다. 풍력터빈에 작용하는 추력은 식 (2)와 같이 표현되며 Fig. 1의 오른쪽과 같은 비선형 특성을 가지는 추력계수를 포함한다. 추력 식은 Taylor 시리즈를 이용하여 선형 상태공간방정식으로 표현할 수 있으며 D행렬을 이용하여 피치각 변화에 따른 추력 변화량을 산출할 수 있다. 제어 알고리즘에는 Fig. 5의 스케줄링 값을 게인 값에서 나누어주는 것으로 게인 스케줄링을 적용하였다.
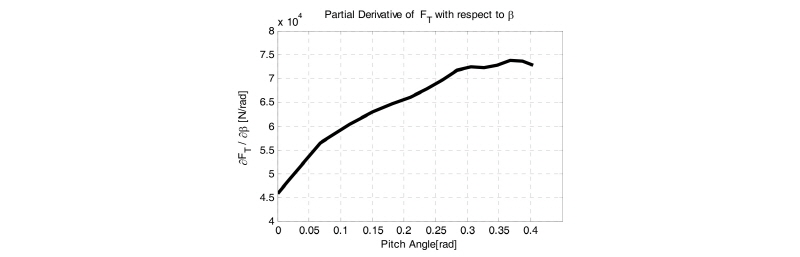
Fig. 6은 GH bladed을 통하여 산출한 선형화 모델과 설계된 타워 댐퍼 제어기를 사용하여 15 m/s에서 입력 풍속에 대한 나셀 전후방향 운동 속도의 주파수 응답을 나타낸 보드 선도이다. 여기서, 실선, 쇄선, 점선 은 각각 타워 댐퍼 적용 전, 기존 타워 댐퍼 적용 후, 개선된 타워 댐퍼 적용 후 주파수 응답을 나타낸다. 1.76 rad/s에서 타워 1차 모드를 확인할 수 있으며 타워 댐퍼 적용 전 대비 기존 타워 댐퍼 적용 후 9.4 dB를 저감시키며 개선된 타워 댐퍼 적용 후 9.7 dB를 저감시킬 수 있다.

4. 연구 결과
본 연구에서는 타워 댐퍼 적용 전, 기존 타워 댐퍼 적용 후, 개선된 타워 댐퍼 적용 후를 각각 비교하기 위하여 평균발전량, 발전량 표준편차, 타워 뿌리 전후, 좌우 방향 손상등가하중을 성능지표로 설정하고 비교하였다. 시뮬레이션은 평균풍속 12~25 m/s에 대하여 정상난류모델(Normal Turbulence Model), 난류강도 16% 조건으로 600초 동안 수행되었다.
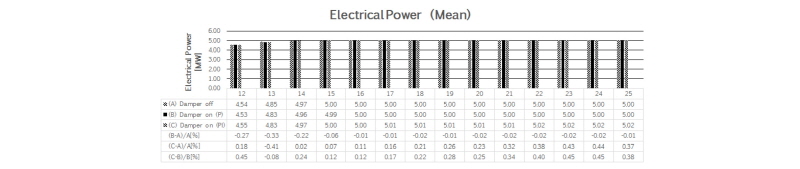
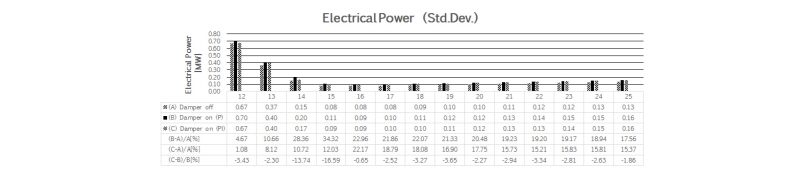
Figs.7, 8은 각각 풍속별 평균발전량, 발전량 표준편차에 대한 시뮬레이션 결과이다. 기존 타워 댐퍼의 경우 타워 댐퍼 적용 전 대비 평균 발전량 오차는 0.5% 미만의 오차를 보이고, 발전량의 표준편차는 최대 34%의 오차를 보인다. 제시된 타워 댐퍼의 경우 타워 댐퍼 적용 전대비 평균 발전량 오차는 0.5% 미만의 오차를 보이고 발전량 표준편차는 최대 22.17% 오차를 보인다. 이는 제시된 타워 댐퍼 알고리즘이 기존 타워 댐퍼 알고리즘보다 안정된 출력성능을 보임을 알 수 있다. 발전량 표준편차 오차가 커진 원인은 타워 댐퍼알고리즘으로 인하여 하중저감을 위해 집단피치출력제어 명령에 추가적으로 피치각이 보상되었기 때문이다. 또한 저 풍속 영역에서 발전량 표준편차가 큰 이유는 저 풍속에서는 고 풍속에 비해 난류강도에 따른 풍속 변동률이 크고12), 난류에 의해 풍력터빈이 정격 풍속을 기준으로 위아래로 변동할 때 모드 스위치의 판단에 따라서 토크제어기와 피치제어기가 on/off하게 되는데 이때 순간적으로 발생한 기계적하중이 최종적으로 출력에 영향을 주기 때문이다13).
Figs.9, 10은 각각 타워 뿌리부분 전후, 좌우방향 굽힘모멘트 손상등가하중(DEL: Damage Equivalent Load)을 나타내고 있다. 그림에서 살펴보면 댐퍼를 적용함으로써 타워 전후 방향 굽힘모멘트가 감소함을 알 수 있고 타워 전후 방향 굽힘 모멘트는 저풍속 영역에서 좌우방향 굽힙모멘트 대비 최대 2배 이상임을 확인할 수 있다. 제시된 타워 댐퍼는 기존 타워 댐퍼와 비교하여 12 m/s 풍속을 제외하고 전후방향 굽힘 모멘트가 저감됨을 확인할 수 있고 15 m/s에서 최대 6% 저감률을 보이는 것을 확인하였다. 기존타워 댐퍼를 사용할 경우 타워 전후방향 굽힘 모멘트이 저감됨에 따라 대비 타워 좌우방향 굽힘모멘트이 증가함을 알 수 있고 14 m/s에서 최대 15% 증가되는 것을 확인할 수 있다. 제시된 타워 댐퍼의 경우 타워 좌우방향 굽힘모멘트 증가율이 상대적으로 작은 것을 확인할 수 있다. 타워 전후 방향 굽힘 모멘트의 경우 12 m/s에서 기존 타워 댐퍼 성능이 낮은 것을 확인할 수 있는데 그 이유는 정격 풍속 구간에서는 잦은 Mode 스위치의 변환이 생기게 되어 순간적으로 발생한 기계적 하중의 영향으로 볼 수 있다. 과도 구간의 비선형성 문제는 대부분의 풍력터빈이 가지고 있는 문제로 알려져 있다14).

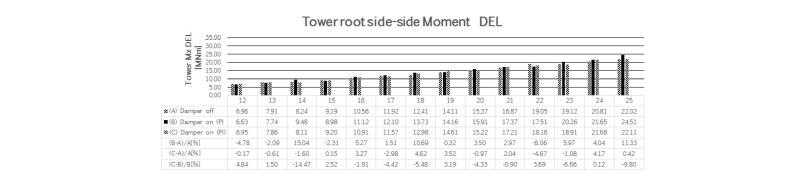
Fig. 11는 15 m/s에서 타워 댐퍼 적용 전(Damper off), 기존 타워 댐퍼(Damper on P), 제시된 타워 댐퍼(Damper on PI) 각각의 타워 전후방향 뿌리 부분 하중 파워 스펙트럼 밀도(PSD, Power Spectral Density)를 나타내고 있다. 약 0.28 Hz에서 타워 1차모드 성분이 타워 댐퍼 적용 후 저감되는 것을 확인하였다.

5. 결 론
본 논문에서는 NREL 5 MW 대형 풍력터빈을 모델링하였고 기존 타워 댐퍼 알고리즘 보다 개선된 출력 및 하중저감 성능을 가진 타워 댐퍼 알고리즘을 제안하였다. 타워 댐퍼 적용 전후로 평균 발전량은 0.5% 미만의 오차를 보이나 풍속변화에 따른 추가적인 피치각 보상으로 발전량 표준편차가 증가되었음을 확인할 수 있다. 하지만 제안된 타워 댐퍼 알고리즘은 발전량 표준편차를 통하여 기존 타워 댐퍼 알고리즘보다 안정된 출력성능을 가짐을 확인하였다. 또한, 타워 전후 방향 굽힘 모멘트 값을 기존 타워 댐퍼 대비 최대 7.9% 이상 저감하였고 타워 전후방향 파워스펙트럼 밀도을 통하여 그 효과를 확인하였다. 타워 뿌리부 전후 방향 굽힘 모멘트는 크게 감소하였으나 타워 뿌리부 좌우 방향 굽힘 모멘트는 풍속에 따라 꾸준히 증가하고 있어 타워 뿌리부 좌우 방향 굽힘 모멘트 저감 방법에 대한 연구가 필요할 것으로 사료된다.
