

1. 서 론
태양광 모듈은 동작점에 따라 출력이 비선형적으로 변화하며, 일사 강도나 온도 등의 외부 요소에 의해 출력의 크기가 변하는 특성을 지니고 있다. 이러한 태양광 모듈의 비선형 특성으로부터 최대전력을 가지는 동작점을 추종하는 최대전력추종(Maximum Power Point Tracking : MPPT) 제어는 태양광 인버터의 필수적인 기능이다1).
일반적으로 태양광 인버터는 DC/DC 컨버터(부스트 컨버터)와 DC/AC 인버터로 구성되며, 이런 2단계(two stage) 구조에서는 전 단계인 부스트 컨버터에서 MPPT 제어를 하게 되므로 안정적인 MPPT 제어를 하기 위해서는 부스트 컨버터의 제어기가 적절하게 설계되어야 한다2).
본 논문에서는 부스트 컨버터의 입력 측 캐패시터와 기생 저항을 고려하여 상태 공간 평균화 기법을 이용하여 모델링하고, 모델링된 전달함수와 MATLAB을 통해 아날로그 제어기를 설계하였다. 그리고 설계한 아날로그 제어기를 디지털 제어기로 변환하고, PSIM 시뮬레이션을 통해 제어기의 성능을 확인하였다. 또한, 전압만 제어하는 단일 루프 제어기와 전압 제어기 내부 루프에서 전류를 제어하는 이중 루프 제어기의 성능을 비교하였다. 마지막으로 실제로 국내에 판매 중인 단상 태양광 인버터에 설계된 제어기를 적용하여 실험을 통해 각 제어기의 성능을 비교 검증하고자 한다.
2. 시스템 모델링
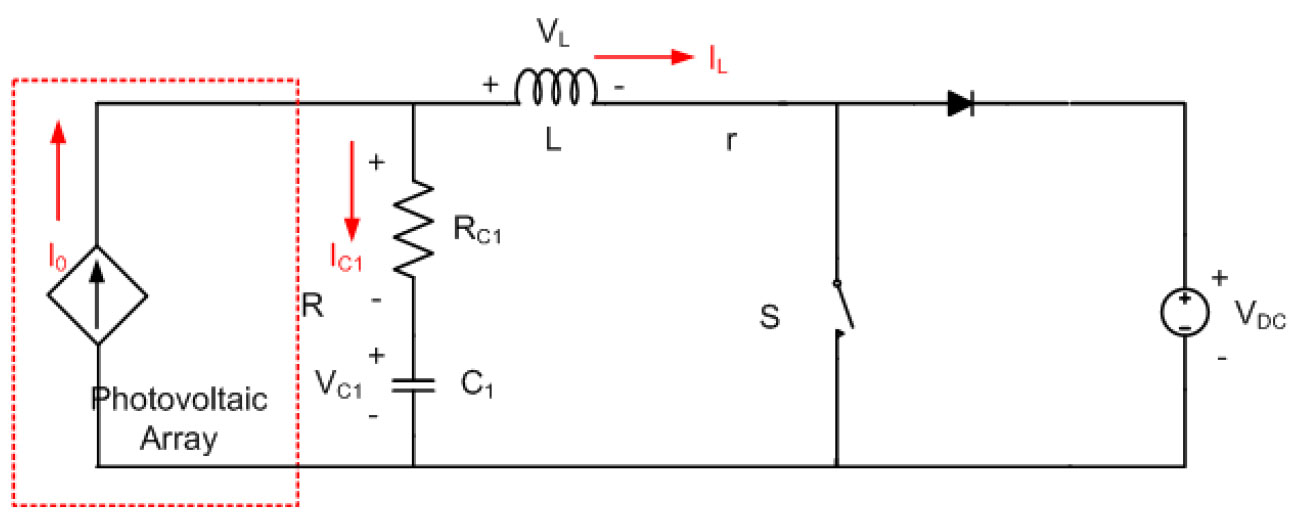
상태 공간 평균화 방법을 이용하여 태양광 모듈에 연결된 부스트 컨버터의 입력을 전류원 형태로(입력측 저항이 없는 상태 : 단순 전류원) 보면 Fig. 1과 같은 회로로 나타낼 수 있고, 회로의 상태 방정식은 식(1)과 같이 나타낼 수 있다3).
그리고 스위치(일반적으로 IGBT) S의 동작에 따라 2가지로 나누어 볼 수 있으며, 스위치가 ON (Short) 되었을 때 회로의 방정식은 식(2), (3)과 같으며 식(1)과 같은 행렬 형태로 바꾸면 식(4)와 같이 표현된다.
반대로 스위치가 OFF (Open) 되었을 때 회로의 방정식은 식(5), (6)과 같으며, 위와 같이 행렬 형태로 바꾸면 식(7)과 같이 표현된다.
스위치의 동작에 따른 행렬과 미소 변동분을 고려하기 위해 식(1)의 행렬들을 정상상태 성분과 미소 변동분으로 나누고, 정상상태 성분을 제거하고 미소 변동분의 곱항을 무시하면 식(8)과 같이 정의할 수 있다.
스위치의 위의 표현대로 하면 식(4)와 식(7)의 행렬식은 식(9)와 같이 정리되며, 이를 토대로 식(8)을 이용하면 상태변수 x에 대한 상태방정식 수식은 식(10)과 같이 표현된다. 정상상태 동작점에서 소신호 블록도는 Fig. 2와 같이 표현할 수 있으며, 식(10)을 전개하여 ~ 개루프 전달함수를 얻을 수 있다.
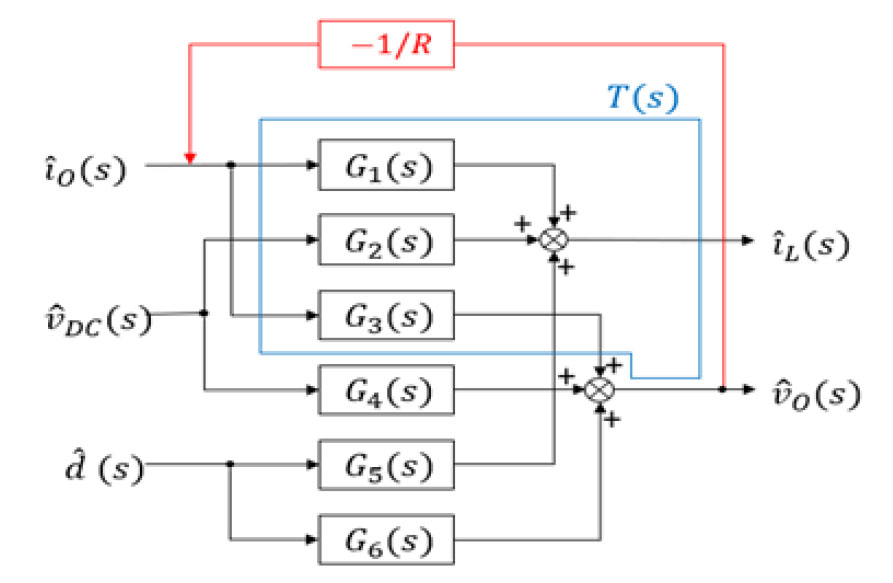
그러나 태양광 모듈은 비선형 소스원이므로 입력 전류와 전압을 고려하여 부스트 컨버터에 연결할 경우, 내부 저항의 관계에 의해 폐루프가 형성되게 된다. 따라서 내부저항이 포함된 태양광 모듈을 연결할 경우, 부스트 컨버터 모델의 개루프 전달함수는 식(11), (12), (13), (14)와 같이 정리된다. 여기서 R은 태양전지의 저항값이며, 기존의 io(s)에 피드백 성분이 더해진다. 따라서 소신호 블록도는 Fig. 3과 같이 표현할 수 있다.
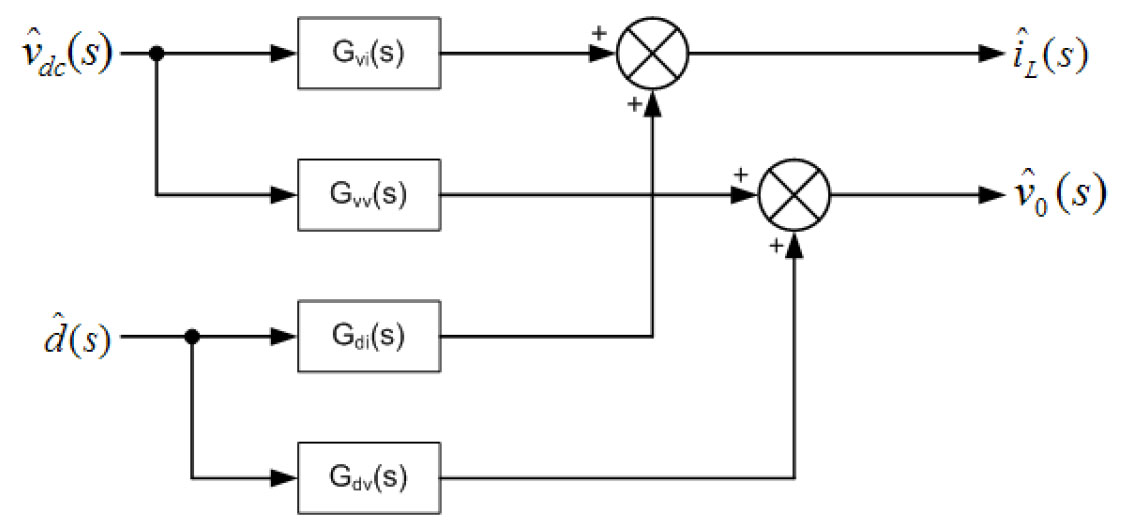
Table 1은 부스트 컨버터와 태양광 모듈의 한 동작점에서의 파라미터이며, 이 파라미터들을 대입하면 최종 전달함수는 식(15), (16), (17), (18)과 같다.
3. 제어기 설계
3.1 전압 제어기 설계
전압 제어기는 2pole 2zero로 설계하였으며, 두 개의 영점과 공진 주파수를 동일하게 설정했고 극점 주파수 대역만으로 조절하여 좀 더 간단하게 위상 보상이 가능하도록 설계하였다. 전압 제어기의 루프 이득은 와의 곱으로 표현되며, 제어기 설계 기준에 따라 루프 이득을 구성하면 Fig. 4와 같은 보데 플롯을 얻을 수 있다.
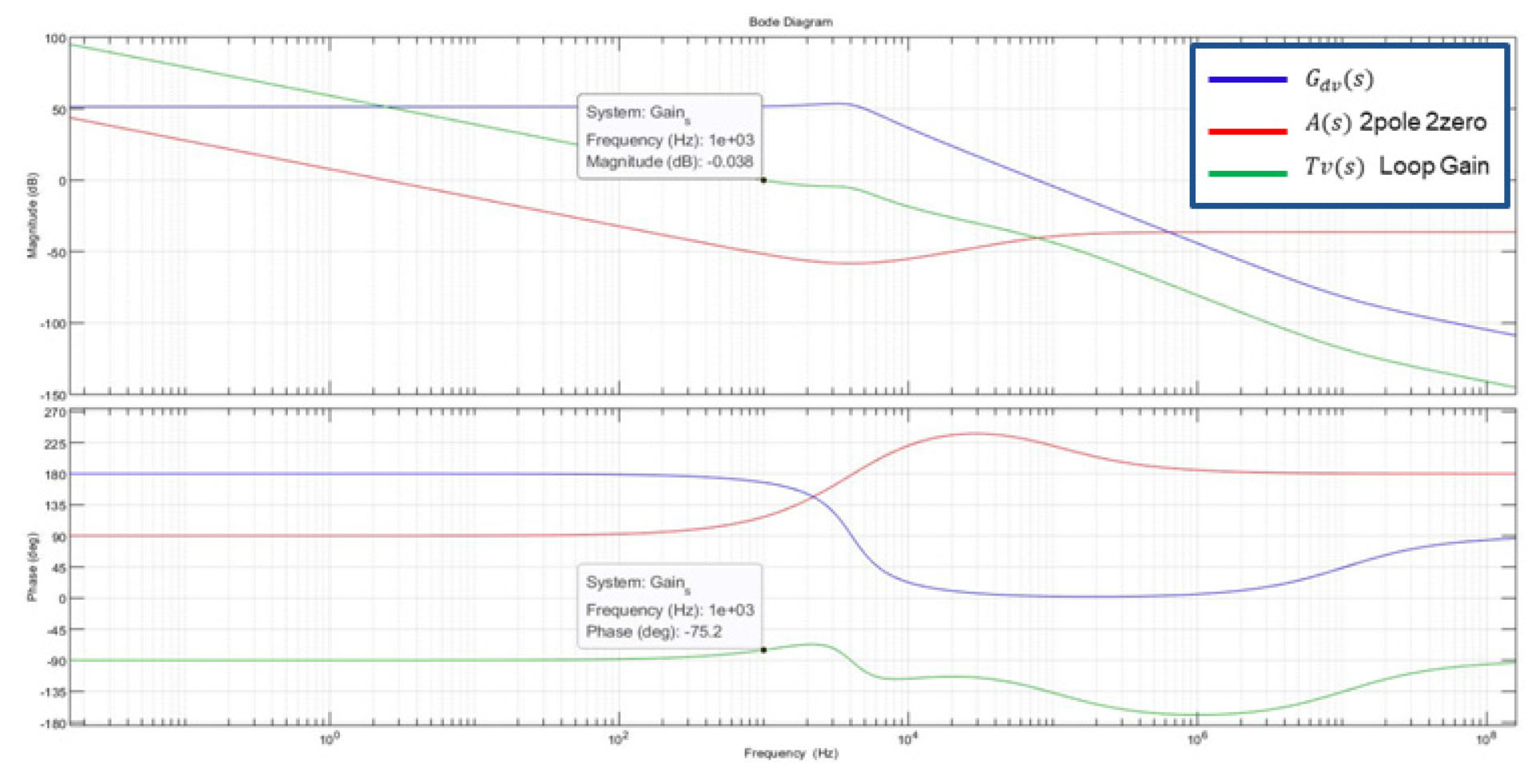
결과적으로 교차주파수 1 khz 대역에서 51.7 dB를 보상하여 0 dB로 설계했고 이는 기존의 0 db 대역인 78.2 kHz에서 77.2 kHz만큼 저주파 대역으로 교차주파수를 이동시켜서 1 kHz의 교차주파수와 104.8도의 위상여유의 특성을 가지게 된다.
3.2 전류 제어기 설계
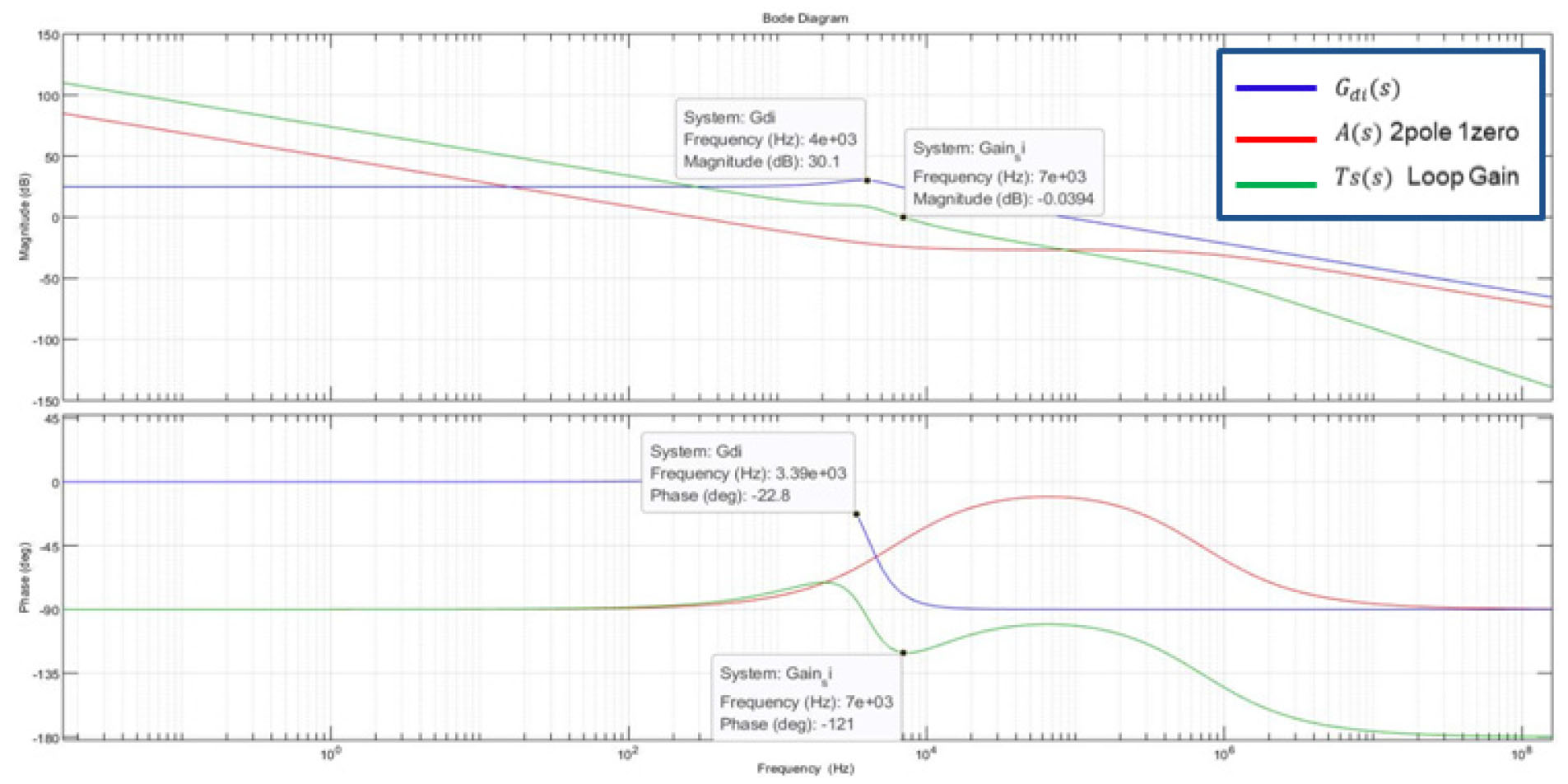
전류 제어기는 2pole 1zero로 설계하였으며, 전압 제어기의 응답이 영향을 미치지 못하도록 교차 주파수를 전압 제어기와 비교했을 때 7배 높은 7 kHz로 설계하였다. 전류 제어기의 루프 이득은 와 의 곱으로 표현되며, 제어기 설계 기준에 따라 루프 이득을 구성하면 Fig. 5와 같은 보데 플롯을 얻을 수 있다.
결과적으로 교차주파수 7 khz 대역에서 24.2 dB를 보상하여 0 dB로 설계했고 이는 기존의 0 db 대역인 84.6 kHz에서 77.6 kHz만큼 저주파 대역으로 교차주파수를 이동시켜서 7 kHz의 교차주파수와 59도의 위상여유 특성을 가지게 된다.
4. 단일 루프와 이중 루프 제어기
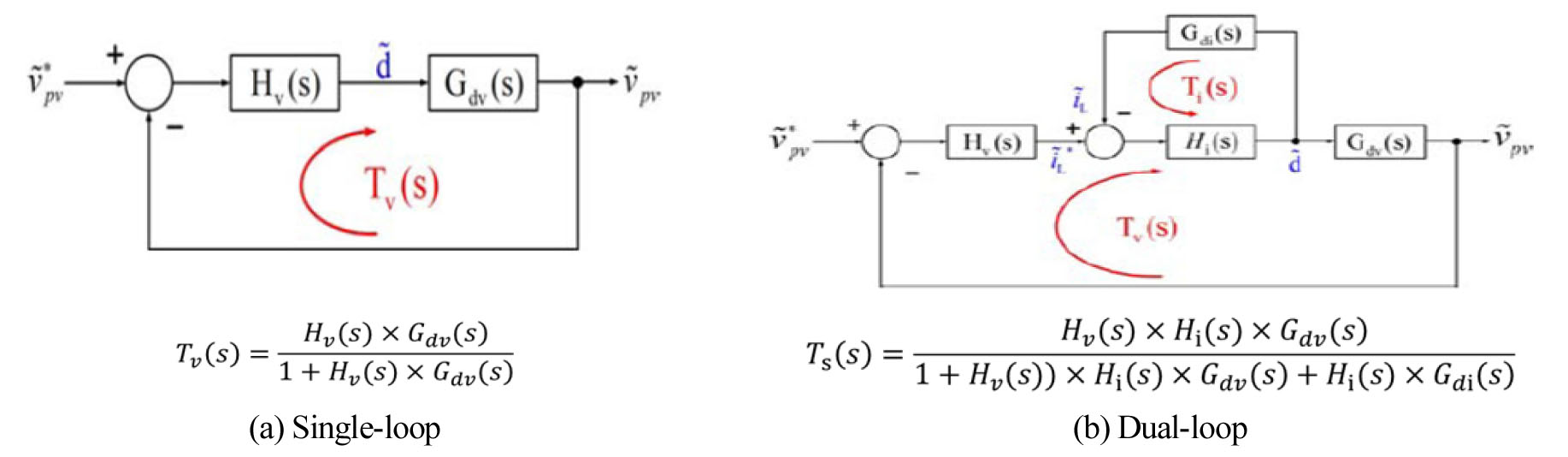
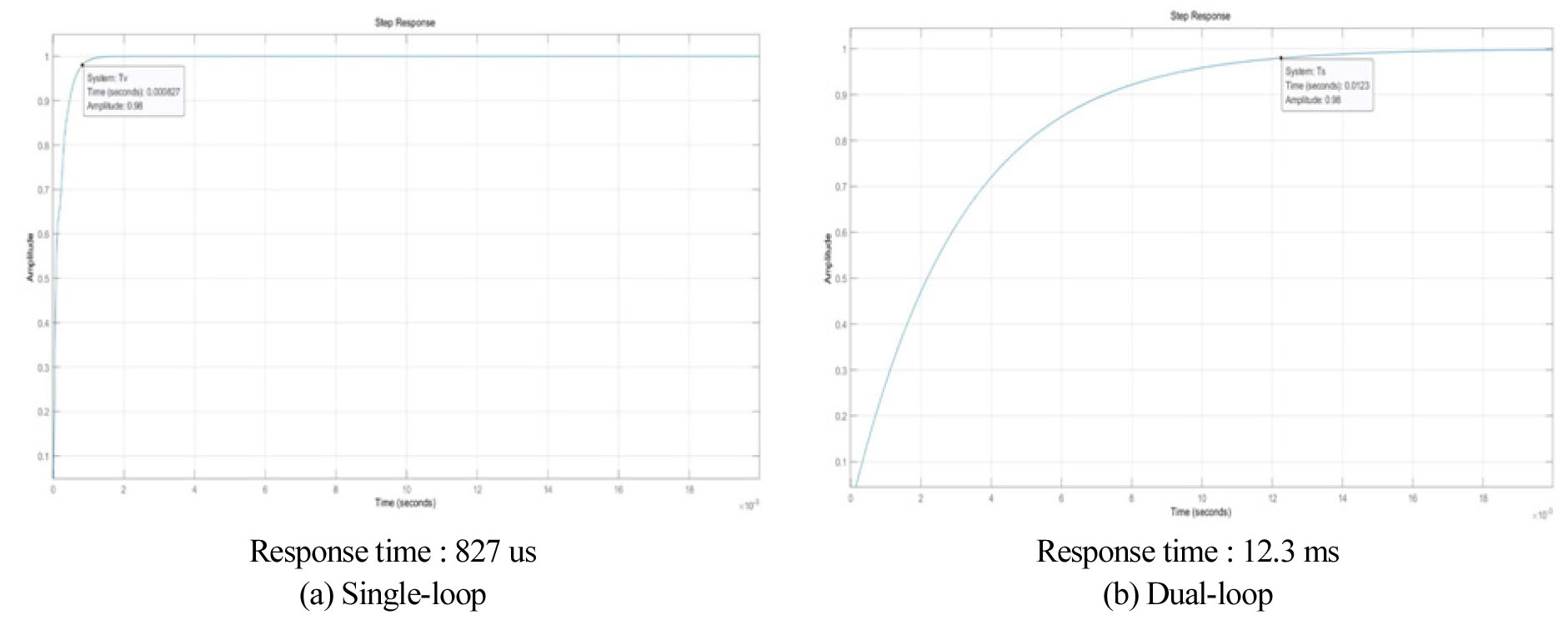
앞서 설계한 전압 제어기와 전류 제어기를 이용하여 부스트 컨버터의 전압 제어기를 단일 루프와 이중 루프로 구성하였을 때 블록도와 루프 이득은 Fig. 6과 같이 정리할 수 있고, 각 루프의 응답 속도는 Fig. 7과 같다.
5. 시뮬레이션
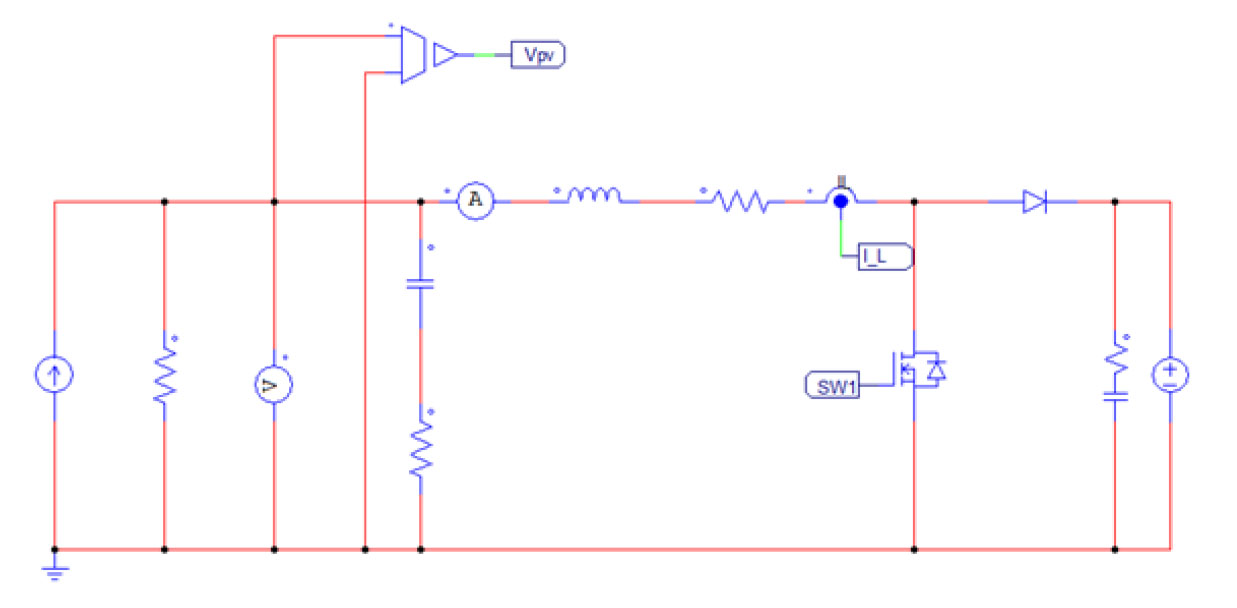
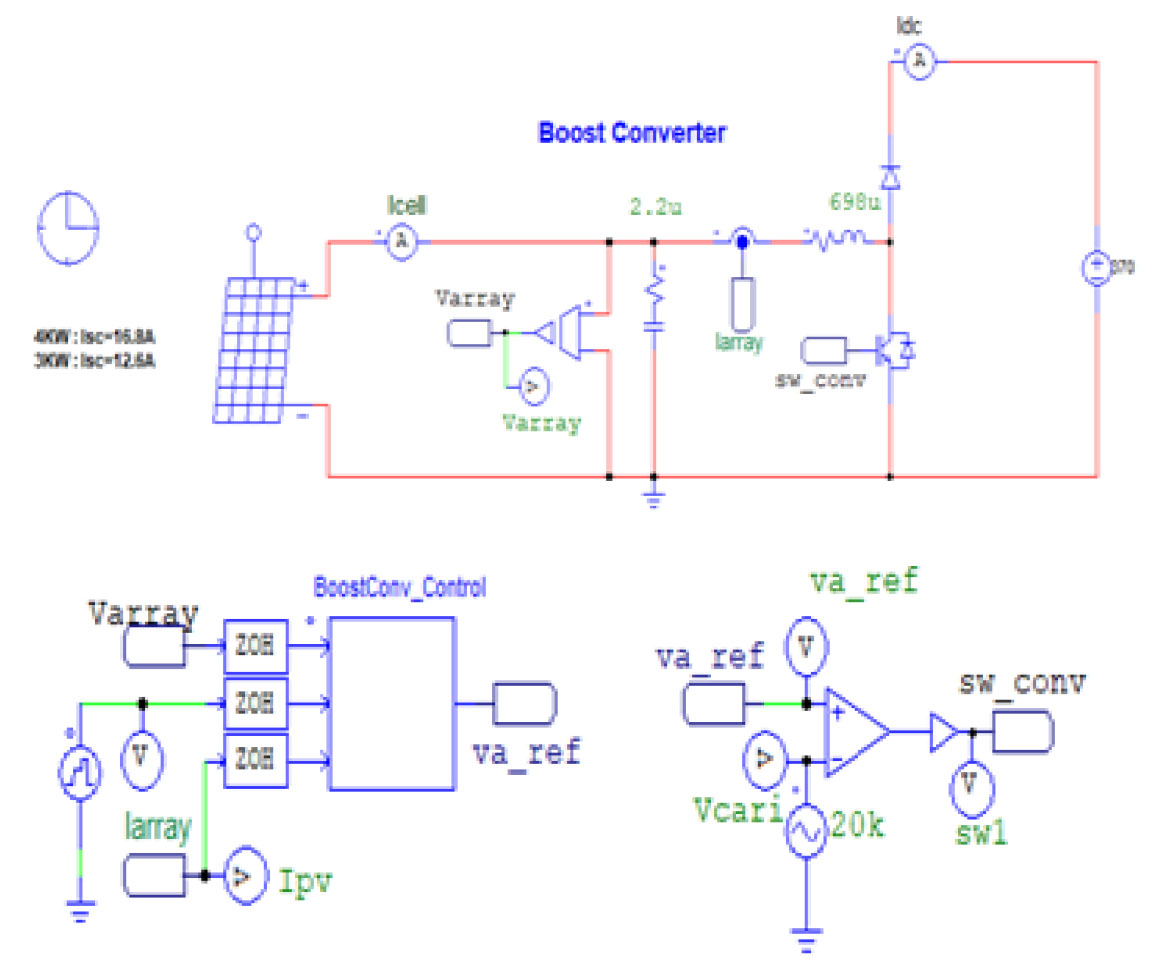
앞서 설계한 단일 루프 제어기와 이중 루프 제어기의 실제 동작을 모의하기 위해 Fig. 8과 같이 PSIM 사용하여 부스트 컨버터 회로를 구성하였으며, 단일 루프와 이중 루프 제어기를 Fig. 9와 같이 아날로그 블록으로 구성하였다.

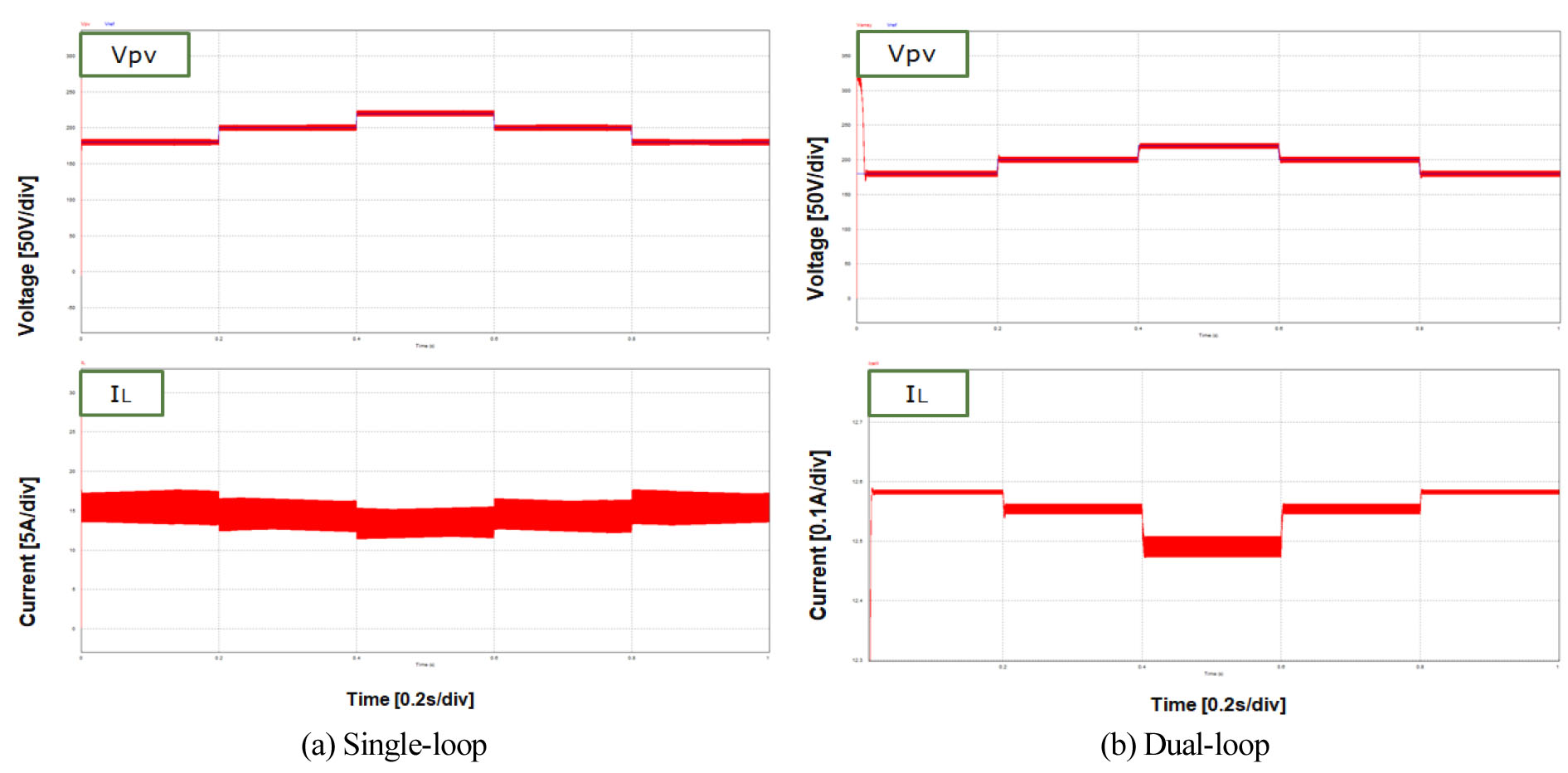
위의 회로에서 PV 전압 지령을 180 V~220 V 범위에서 ±20 V로 0.2초마다 변동하였을 때, PV 전압과 인덕터 전류는 Fig. 10과 같다. 본 파형을 보면 두 제어기 모두 PV 전압 지령에 따라 제어가 잘 되지만, 인덕터 전류의 리플 크기가 단일 루프는 약 4 A, 이중 루프는 약 0.05 A로 단일 루프 제어 시 약 80배 정도 더 큰 것을 확인할 수 있다.
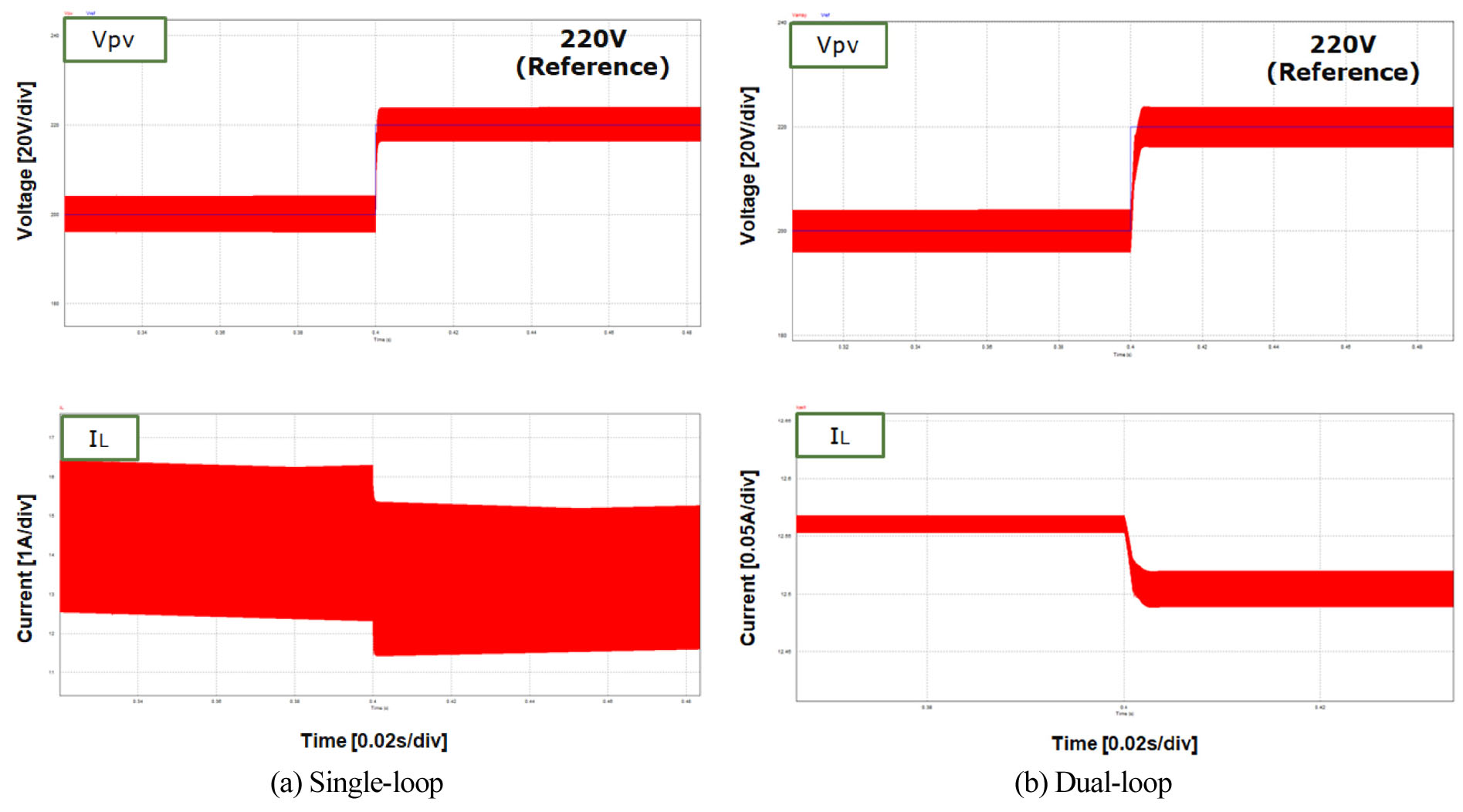
스텝 지령에 따른 파형은 Fig. 11 (0.02 s/div)에서 더 자세히 볼 수 있으며 PV 전압 파형만 보면 두 제어기의 성능이 비슷하지만, 오히려 단일 루프 제어기의 응답성이 더 좋은 것을 볼 수 있다. 하지만 인덕터 전류의 리플 크기는 확연히 이중 루프 제어기가 우수한 것을 확인할 수 있다.
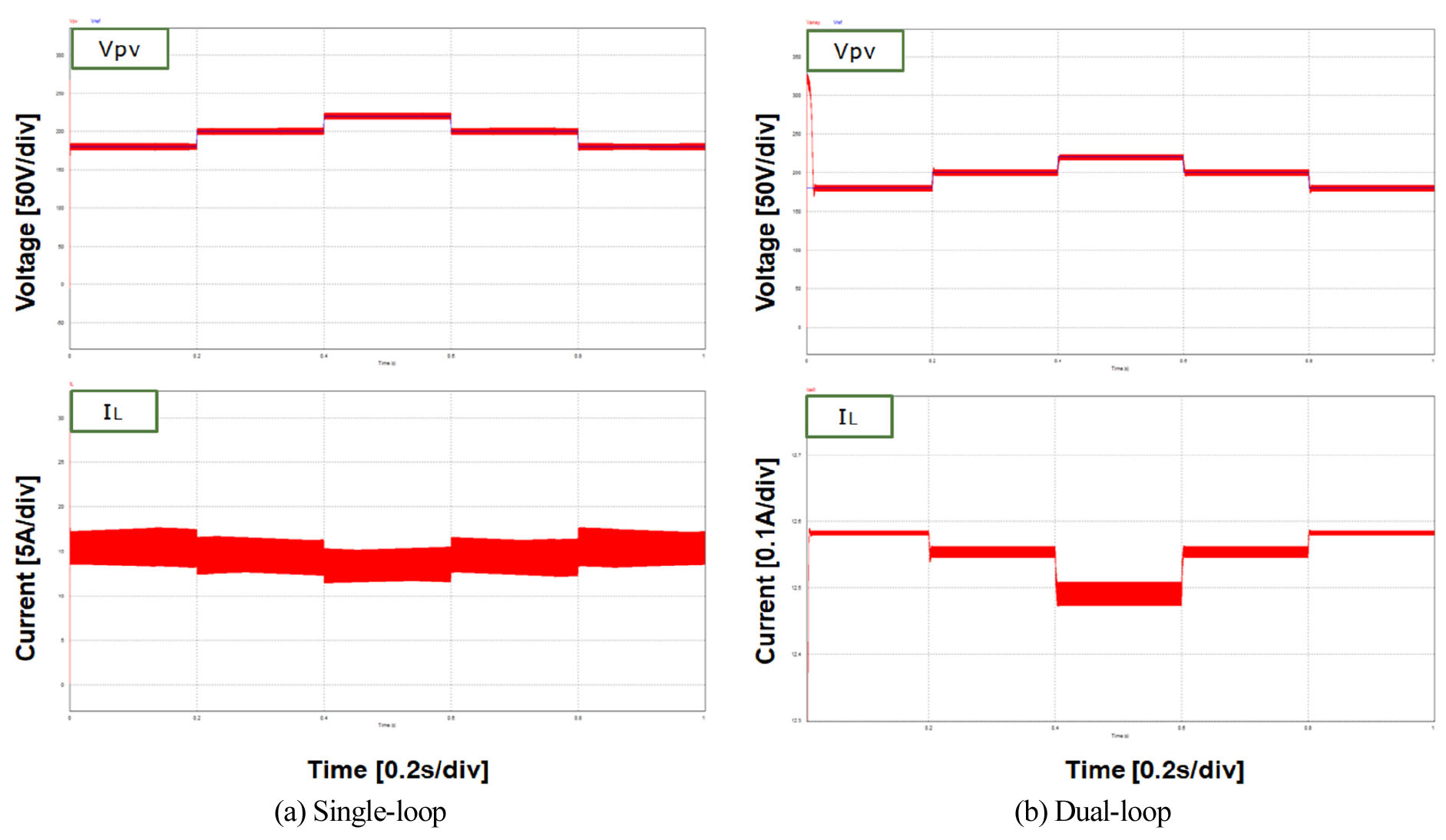
또한, 앞서 아날로그로 설계된 제어기들을 실제 인버터에 적용하여 시험하기 위해 디지털 제어기로 변화해서 Fig. 12와 같은 회로에 C block을 통해 구현하였으며, 각 제어기별 동작 파형은 Fig. 13과 같이 아날로그 블록으로 구현하였을 때와 유사한 동작 파형을 볼 수 있다.
6. 실 험
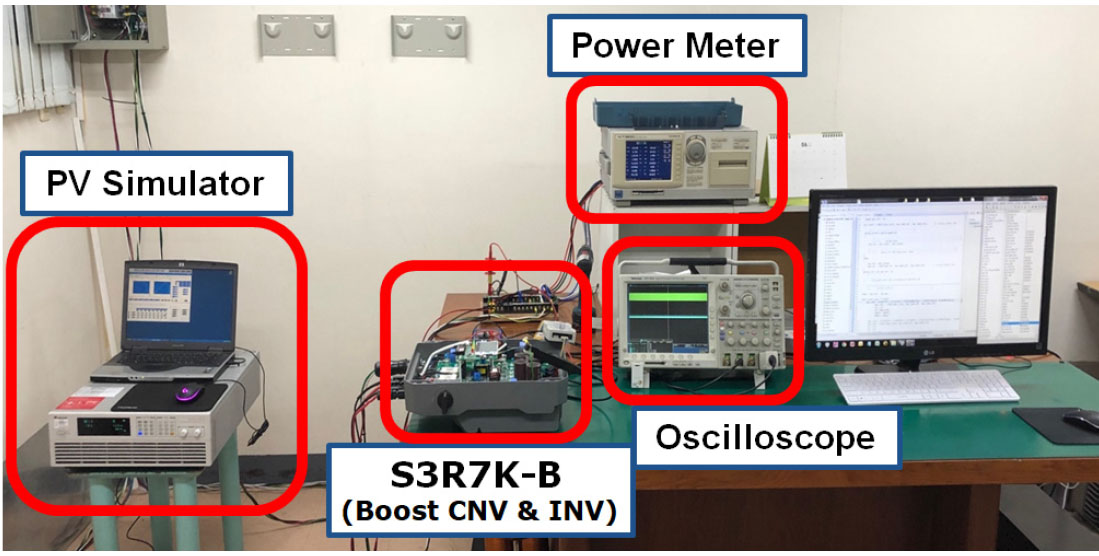
앞서 설계한 제어기들의 실제 성능을 검증 및 비교하기 위하여 실제 국내에 판매 중인 금비전자(주) 사의 단상 태양광 인버터(모델명 : S3R7K-B)에 설계된 제어기들을 적용하여 시험을 진행하였다. 시험은 Fig. 14와 같이 CHROMA 사의 PV 시뮬레이터, 태양광 인버터, 오실로스코프, 전력분석기로 구성하였다.
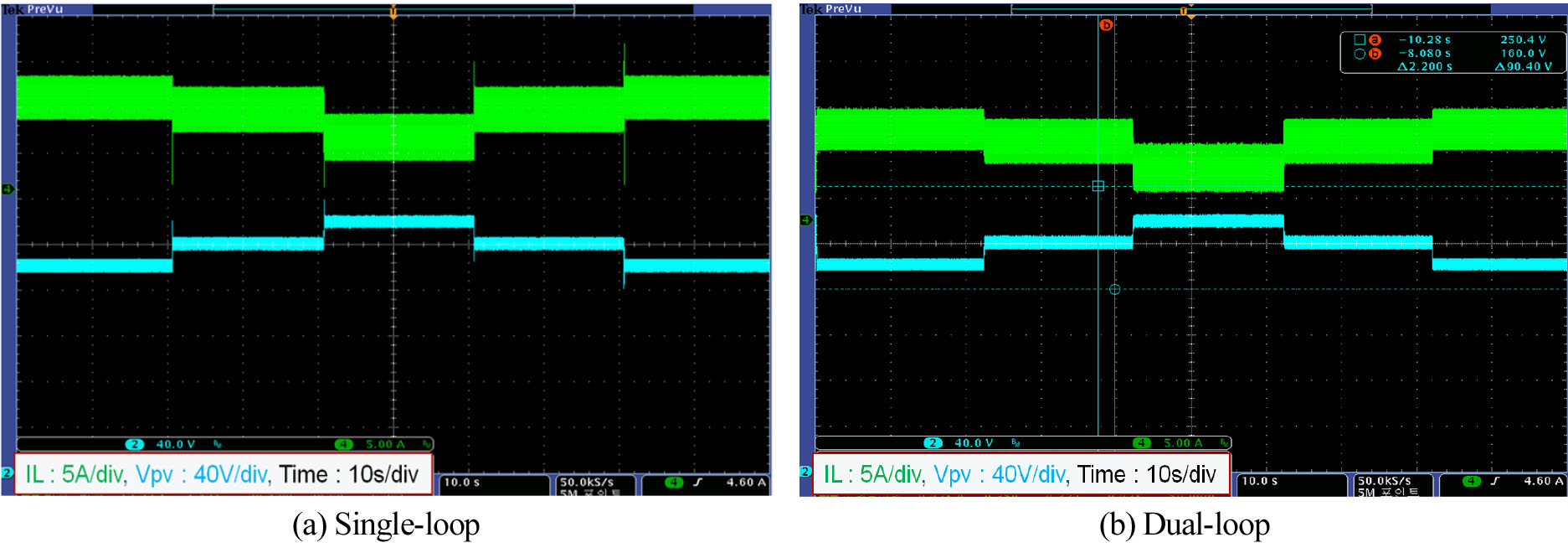
앞서 설계된 단일 루프 제어기와 이중 루프 제어기의 동작 파형 비교를 위해 부스트 컨버터에 각 제어 소스를 적용하였으며, 앞서 진행한 시뮬레이션과 동일하게 PV 전압 지령을 180 V~220 V 범위에서 ±20 V 씩 스텝 변동하였을 때, 각 제어기들의 동작 파형은 Fig. 15와 같다. 두 제어기 모두 각 전압 지령에 맞게 PV 제어가 잘 되는 것을 확인할 수 있지만, 전압 지령이 바뀌는 과도 상태에서 이중 루프 제어기에 비해 단일 루프 제어기는 PV 전압과 인덕터 전류 모두 큰 피크를 발생하는 것을 확인할 수 있다.
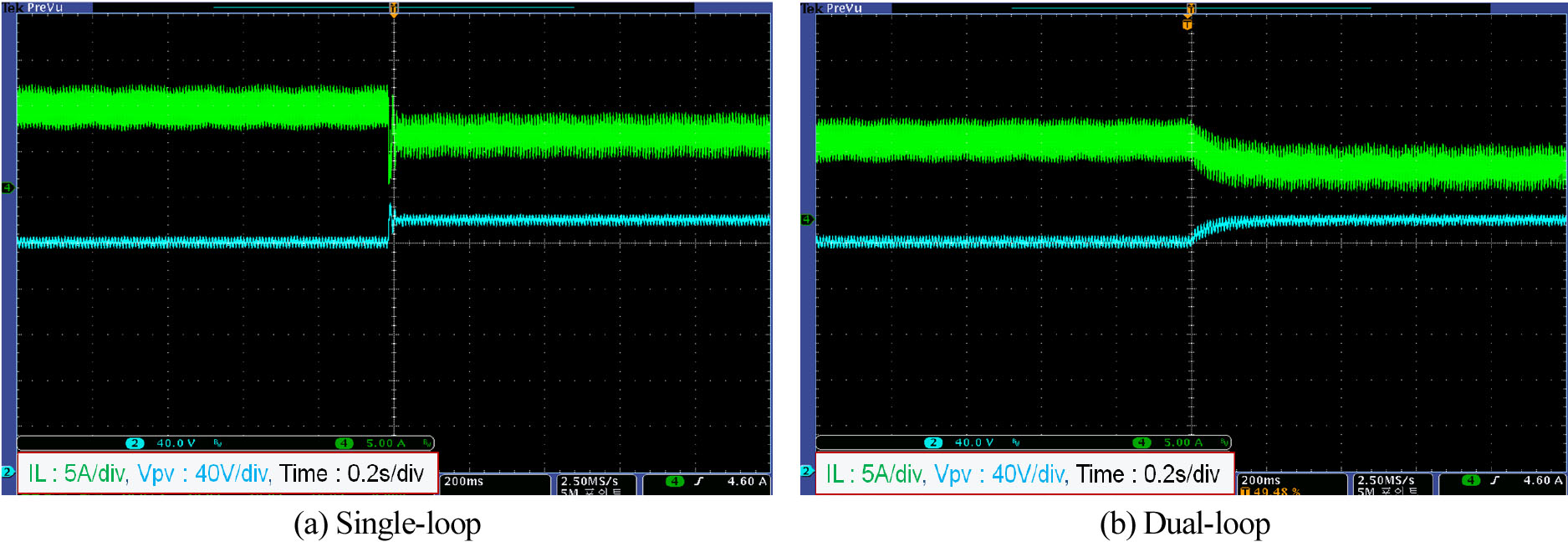
전압 지령이 200 V에서 220 V로 바뀌는 순간의 파형을 자세히 비교하기 위해 확대한 파형은 Fig. 16과 같다. 확대 파형을 보면 앞서 진행한 시뮬레이션 결과와 동일하게 응답성은 단일 루프 제어기가 더 빠른 것을 확인할 수 있지만, 과도 상태에서 전압과 전류 피크가 발생하는 것을 확인할 수 있다. 또한, 시뮬레이션과 조금 다른 부분은 단일 루프 제어기의 파형에서 과도 상태에서 전압 피크가 발생된다는 것과 정상 상태에서 인덕터 전류의 리플 크기가 이중 루프 제어기와 유사한 것이다.
7. 결 론
본 논문에서는 태양광 인버터의 필수 기능 중 하나인 MPPT 제어를 적절하게 하기 위해서 태양광 모듈의 비선형 특성을 고려하여 부스트 컨버터를 모델링하고 이를 전달함수의 관점에서 분석하였으며, 이 시스템의 전달함수를 이용하여 아날로그 형태의 전압 제어기와 전류 제어기를 설계하였다. 그리고 설계된 아날로그 제어기를 PSIM 아날로그 블록을 통해 시뮬레이션을 진행하였으며, 이를 디지털로 변환하여 시뮬레이션을 진행하였다. 마지막으로 이를 실제 판매 중인 태양광 인버터에 적용하여 각 제어기의 성능을 비교, 검증하였다.
결론적으로 초기 설계 시 예상했던 것과 같이 단일 루프 제어기는 응답성은 우수하지만 과도상태 특성이 우수하지 않다는 점을 확인하였으며, 이중 루프 제어기는 응답성이 조금 늦지만 과도상태와 정상상태 특성 모두 우수한 장점을 시뮬레이션과 실험을 통해 검증하였다. 일반적으로 태양광 시스템에서 빠른 응답보다는 정상상태와 과도상태의 안정성이 더욱 중요하므로 실제 시스템에는 단일 루프 제어기에 비해 이중 루프 제어기가 적절한 것을 검증하였다.
