

1. 서 론
2. 에너지 발전량 예측 방법
2.1 연구 지역 및 주행 경로
2.2 태양광 전기차 구성
2.3 에너지 발전량 예측
2.4 에너지 발전량 검증 실험방법
3. 에너지 발전량 예측 결과 및 검증
3.1 모듈 경사각 및 주행 방향 변화에 따른 일사량, 발전량 변화 분석
3.2 에너지 발전량 예측값 및 관측값 비교
4. 토 의
4.1 봄철 에너지 발전량 분석
4.2 여름철 에너지 발전량 분석
4.3 연구의 시사점 및 제언
5. 결 론
1. 서 론
현재 대한민국은 2050 탄소중립 시나리오에 따라 탄소 배출 감축에 힘쓰고 있다. 여러 산업에서 탄소중립을 달성하기 위해 다양한 기술 개발이 이루어지고 있다. 특히 수송 산업에서는 탄소중립을 위해 차량의 전기화 및 수소화를 진행하고 있다. 2018년 기준 국내 전체 온실가스 배출량의 13.5%인 98.1백만 톤의 온실가스가 수송 부문에서 배출되고 있다. 이 온실가스 배출량을 2030년까지 2018년 대비 37.8% (61 백만 톤)1)까지 감축하여 2050년에 탄소중립을 실현할 것을 목표로 하고 있다. 수송 부문에서의 2050 배출 목표는 2개의 시나리오(A안: 자동차 전면 전기, 수소화 / B안: 자동차 85% 전기, 수소화 및 잔여 자동차는 e-fuel 등 대체 연료 활용)로 구분되고 있는데 두 시나리오 모두 국내 운송 수단의 최소 85% 이상을 전기화, 수소화하는 것을 목표로 하고 있다2).
수송 부문에서의 온실가스 배출량 중 96.5%가 도로 주행 중에 발생하는 만큼 탄소중립을 위해서는 도로를 주행하는 운송 수단으로부터 온실가스 배출량을 줄여나갈 필요가 있다3). 2023년 기준 전기차 판매량은 전년 대비 약 35%가 증가(약 1,400만 대)했고, 전 세계 전기차 보유량은 2018년 대비 6배 이상(약 4,000만 대) 증가했다. 그리고 이 비율은 현재 정책 시나리오에 따라 2035년까지 약 5억만 대로 증가할 것이라 예상된다. 즉 2035년에는 도로 위 차량의 약 25%가 전기차가 될 것이라 예상된다는 것이다. 그러나 전기차는 내연기관차에 비해 주행거리가 짧다는 단점이 있다4). 내연기관차는 1회 주유 시 평균 800 ~ 900 km를 주행할 수 있다5). 현재 출시된 전기차 모델의 1회 충전 시 평균 주행거리는 약 400 km이며, 낮은 기온에서는 약 200 ~ 300 km를 주행할 수 있는 것으로 알려져 있다6). 전기차의 주행거리는 내연기관차에 비하면 턱없이 짧은 수준으로 기술 발전을 통해 풀어가야 할 전기차의 단점 중 하나이다.
전기차 연비 문제를 해소하기 위해 전기차의 주행거리를 증가시킬 수 있는 다양한 방법들이 연구되고 있다. 그중에서도 본 연구에서는 태양광 전기차에 집중하였다. 태양광 전기차란 차량 외관(보닛, 지붕, 후미, 문)에 태양광 모듈을 부착하여 주행 또는 주차 시 태양광 발전하는 차량이다7). 태양광 발전량을 주행하거나 배터리를 소모하는 작업에 사용할 수 있다. 여러 완성차 업체에서도(네덜란드 Lightyear의 Lightyear One, 일본 Toyota의 3세대 프리우스 모델, 독일 Sono motors의 Sion 등) 태양광 전기차를 활발히 출시하고 있다. 태양광 전기차의 주행 중 태양광 발전량을 예측하기 위한 다양한 연구가 활발히 진행되고 있다. 대표적으로 Ku et al.8)는 Google Street View를 이용해 10 m 간격으로 도로의 이미지를 수집하여 그림자 데이터를 획득하고 이 데이터로 태양광 전기차로 주행했을 시 배터리 사용이 가장 효율적인 최적 경로를 탐색하는 알고리즘을 개발하였다. 그러나 기존 연구는 태양광 모듈을 차량의 지붕에만 설치한다는 가정하에 발전량을 예측하였으며 주행 실험을 통한 검증을 수행하지 못했다.
태양광 전기차를 포함한 대부분 차량의 후면 유리는 공기 저항을 줄이기 위해 점차 각도가 상부에서부터 하부로 증가하는 구조를 갖는다. 이때 후면 유리 상부와 하부에 부착되는 태양광 모듈의 경사 각도에는 큰 차이가 발생한다. 경사각 차이로 인해 태양 입사각의 차이가 발생하고 태양광 모듈 표면 일사량이 달라져 에너지 발전량에 차이가 발생한다. 또한 태양광 전기차의 주행 방향에 따라 각 모듈에 입사되는 태양광 모듈 표면 일사량이 달라져 에너지 발전량에 차이가 발생할 수 있다. 따라서 태양광 전기차의 에너지 발전량 예측을 위해서는 모듈의 경사각과 주행 조건을 고려할 필요가 있다. Park et al.9)은 태양광 모듈을 차량의 보닛, 지붕, 후면 유리, 양쪽 문에 부착하여 에너지 발전량 차이를 예측하고 이를 실험으로 검증하였다. Pochont et al.10)은 차량의 보닛, 지붕, 양쪽 문에 전천 일사량 센서를 부착하여 주행 중 일사량 변화를 분석하였다. 기존 연구에서는 다음과 같은 한계가 있다. 차량 외관에 설치된 태양광 모듈의 경사 각도와 차량의 주행 방향에 따른 일사량 및 발전량 변화를 분석하지 못했다. 또한 도로 주변 구조물에 의한 직달 및 산란 일사량 저하를 3차원 모델(Digital surface model)로부터 분석하였다. 3차원 모델은 나무에 의한 그림자 영향을 고려하지 못하기 때문에 반구형 이미지를 활용하여 나무 그림자 영향을 고려하고 일사량 저하를 계산하는 것이 효과적이다. Table 1은 기존 연구와 본 연구에서 태양광 전기차의 주행 중 일사량 및 발전량 예측 및 측정을 위해 고려한 인자를 비교한 표이다.
본 연구의 목적은 태양광 전기차의 외관에 부착되는 태양광 모듈의 경사각 차이와 주행 조건에 따른 에너지 발전량 차이를 예측하고 주행 실험을 통해 검증하는 것이다. 국립부경대학교 대연캠퍼스의 도로를 대상으로 태양광 모듈 경사각과 주행 방향 조건을 달리 설정하면서 연간 에너지 발전량을 예측하였다. 발전량 예측을 위해 35개 지점에서 반구형 이미지를 촬영하였고 도로 주변의 건물과 나무에 의한 그림자 영향을 고려하여 직달 및 산란 일사량 저하를 예측하였다. 태양광 전기차를 구성하여 도로를 주행하면서 발전량을 측정하고 이를 예측값을 비교하였다.
Table 1.
Comparison of related research studies and this study
| Reference | Approach | PV mount | Considerations | Driving experiment | |||||
| Solar potential | Power generation |
Module tilt angle | Azimuth | Time domain | Shadow effect | ||||
| Building | Tree | ||||||||
| Ku et al.8) | ○ | ○ | Roof | - | ○ | ○ | ○ | ○ | - |
| Park et al.9) | ○ | ○ | Roof, rear, doors | - | ○ | ○ | ○ | - | ○ |
| Pochont et al.10) | ○ | - | Bonnet, roof, doors | - | ○ | - | - | - | ○ |
| This study | ○ | ○ | Roof | ○ | ○ | ○ | ○ | ○ | ○ |
2. 에너지 발전량 예측 방법
2.1 연구 지역 및 주행 경로
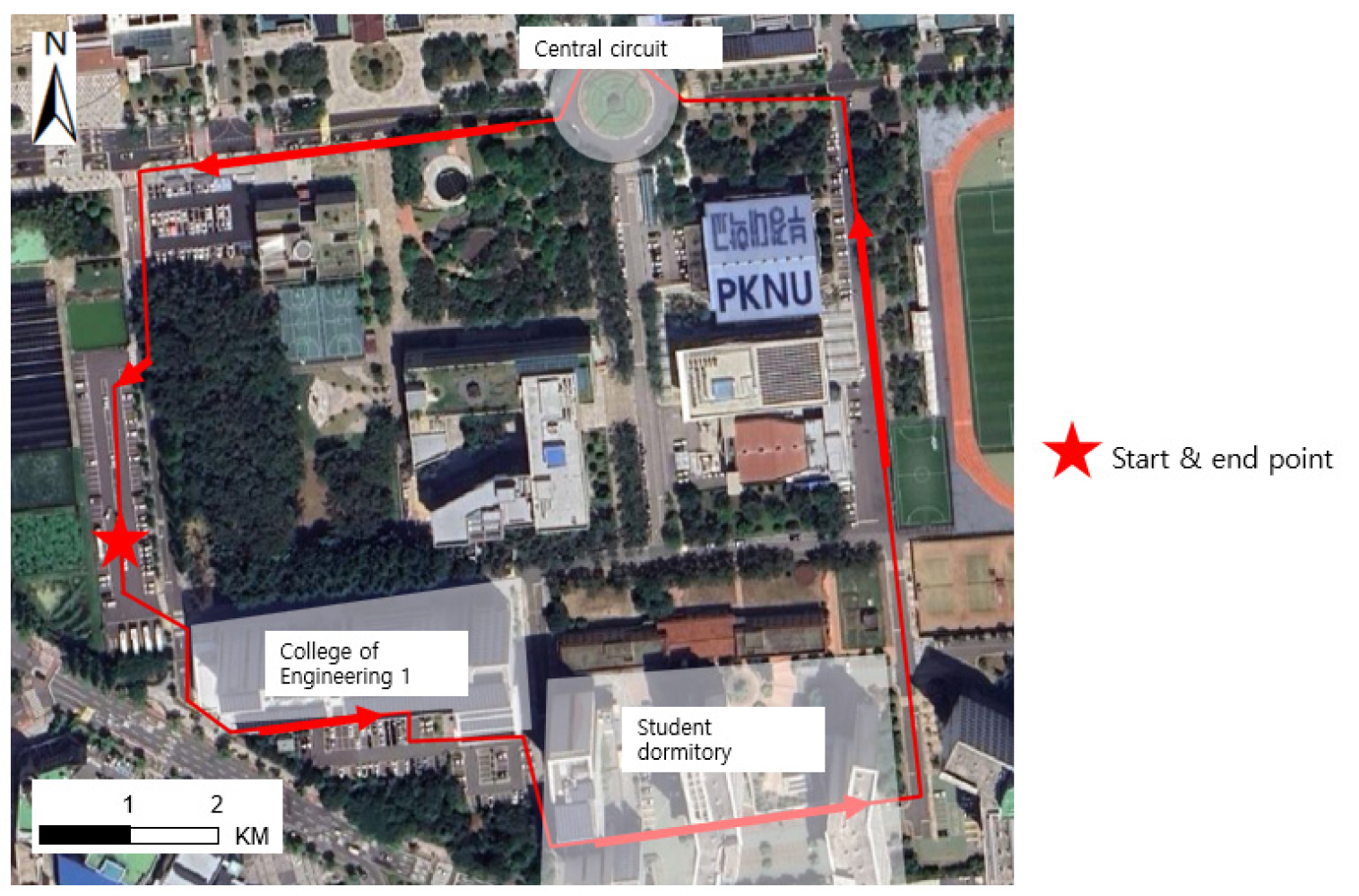
연구 지역은 대한민국 부산광역시 남구에 있는 국립부경대학교 대연캠퍼스(위도 35.1도, 경도 129.1도)로 선정하였다. 연구 지역의 지형은 경사가 거의 없는 평지이다. 태양광 전기차의 에너지 발전량을 예측할 경로는 다음의 두 가지 조건을 따라 선정했다. 첫째, 방위각의 변화에 따른 발전량 데이터를 얻기 위해 동서남북 방향 전부를 주행해야 한다. 둘째, 건물, 나무에 의한 그림자 영향을 고려할 수 있는 경로여야 한다. 두 가지의 조건을 통해 선정된 실험 경로는 Fig. 1과 같다. 실험 경로의 총거리는 1.2 km이며, 경로 양옆으로 건물과 식생이 존재한다. 양어장 주차장을 주행 시작 지점과 종료 지점으로 선정하였고 공학관과 학생생활관을 따라 동쪽으로 주행한 후 중앙 도로까지 북쪽으로 주행한다. 회전 교차로를 진입하여 서쪽으로 주행한 후 다시 출발 지점까지 남쪽으로 주행하여 돌아온다.
2.2 태양광 전기차 구성
본 연구에서 구성한 태양광 전기차의 모습은 Fig. 2와 같다. 태양광 모듈은 실험의 편의성을 위해 비교적 작고 가벼운 55 W 사양으로 적용하였다. 그리고 모듈과 배터리를 원활히 연결해 줄 컨트롤러를 사용해 실시간 발전량을 알 수 있었다. 그리고 시간별 일사량을 측정하기 위해 차량 지붕 거치대에 일사량 센서를 설치하였고 이를 노트북과 연결하여 실시간으로 관측값을 획득하였다. 360° 카메라를 차량 지붕에 설치하여 도로 주변의 구조물에 의한 일사량 저하 비율을 측정하였다. 태양광 모듈 경사각 변화에 따른 발전량의 차이를 측정하기 위해 0°, 15°, 30°, 45°의 각도 변화를 주어 태양광 모듈을 설치하였다. 태양광 모듈 경사각을 변화시킬 때마다 일사량 센서도 경사각과 동일한 각도로 설치하였다. 태양광 전기차 구성에 사용된 재료의 사양은 Table 2와 같다.
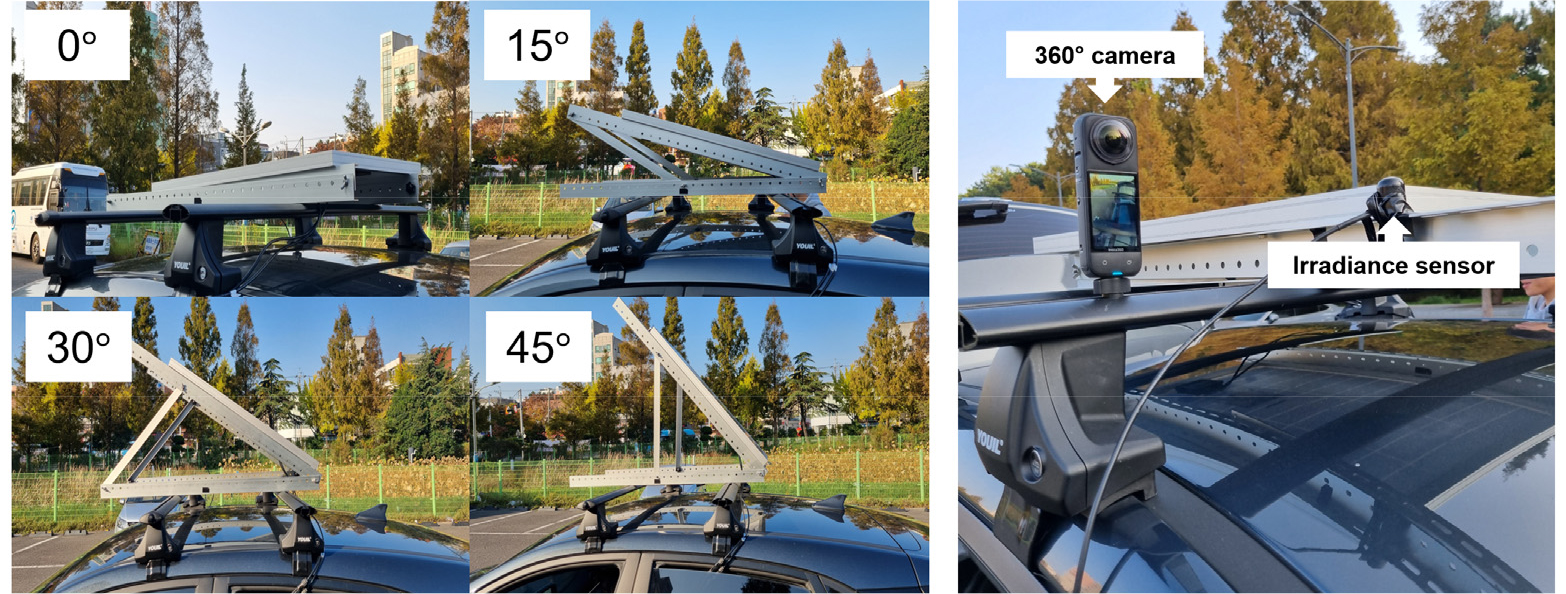
Table 2.
Specification of instruments equipped with the solar electric vehicle
2.3 에너지 발전량 예측
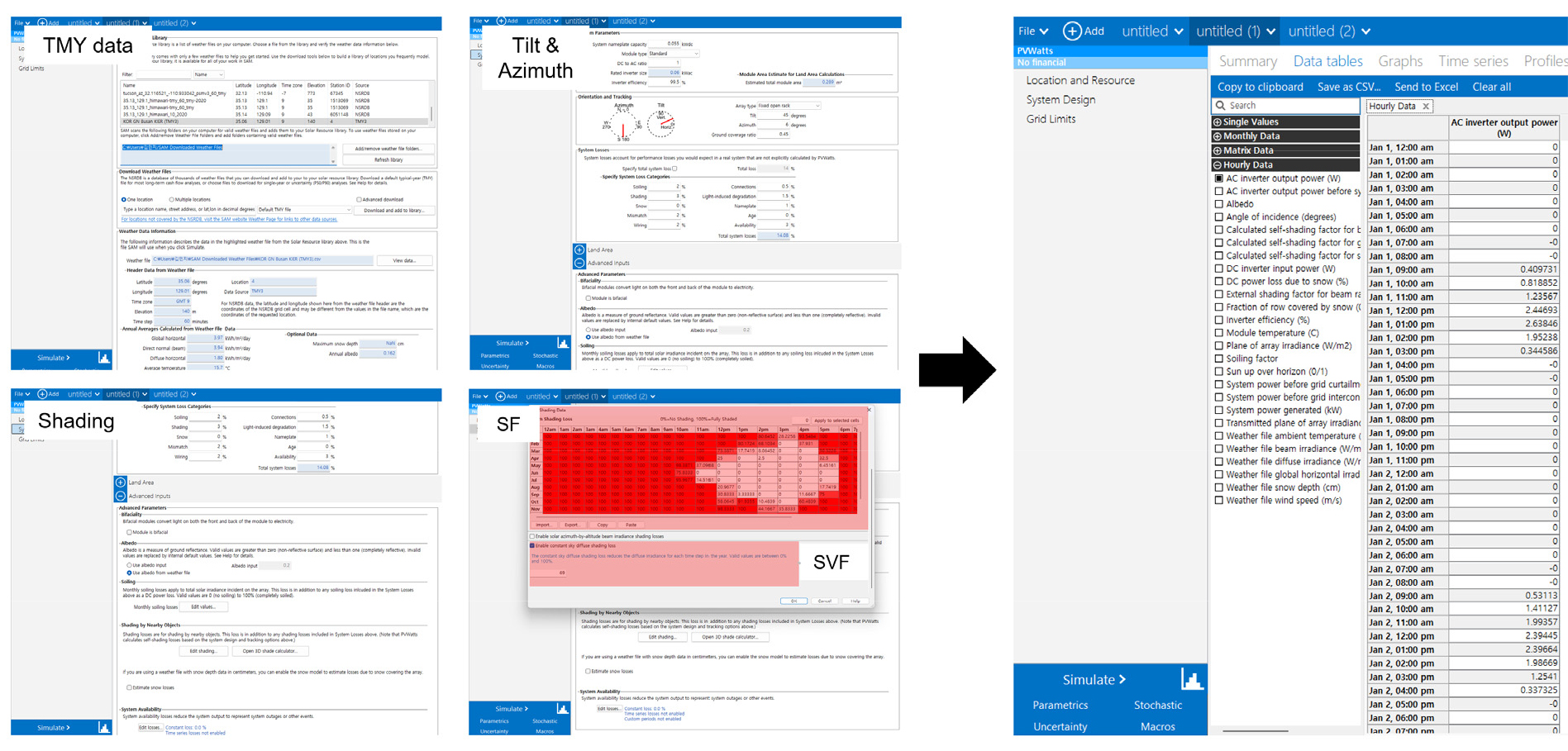
발전량 예측을 위해 미국 국립 신재생 에너지 연구소의 System advisor model (SAM) 소프트웨어를 사용하였다. 주행 경로상의 35개 지점의 발전량을 예측하였다. 예측을 위해 부산 지역의 표준기상년 데이터를 이용하였다. 예측에 필요한 인자에는 태양광 모듈의 방위각, 경사각, 그림자에 의한 직달일사량 저하 비율인 Shading factor (SF) table, 주변 사물에 의한 산란 일사량 저하 비율인 Sky view factor (SVF)가 있다(Fig. 3). 태양광 모듈의 방위각은 지점별 주행 방향을 고려하여 입력하였고, 경사각은 0°, 15°, 30°, 45°를 순차적으로 설정하였다.
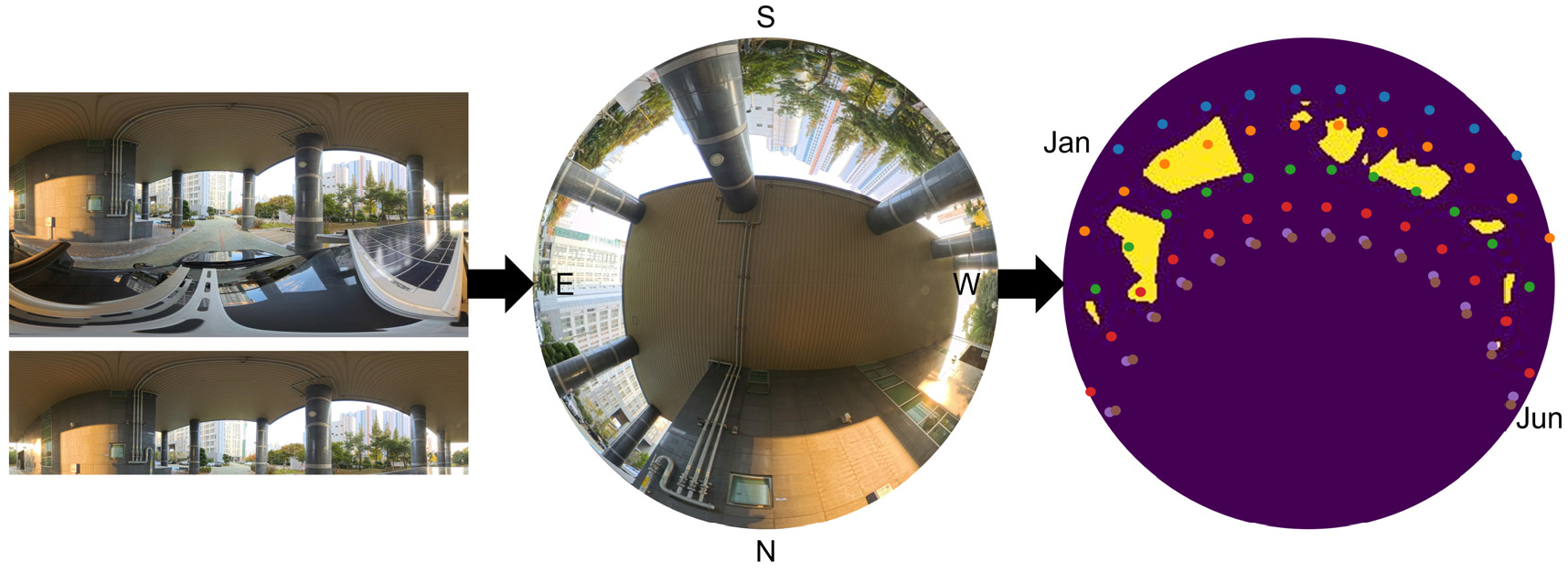
SF table과 SVF를 계산하기 위해 360° 카메라를 이용하여 각 예측 지점의 반구형 이미지를 촬영하였다(Fig. 4). 반구형 이미지는 주변 360° 형상을 원형 이미지로 포착한 것으로 원의 중심이 하늘로 구성된 이미지다. 반구형 이미지에서 하늘 영역과 하늘 이외 영역을 수동으로 분류하였다. SF를 계산하기 위해 반구형 이미지에 태양의 시간별 이동 궤적을 중첩하였고, 태양의 위치와 일치하는 픽셀이 하늘 영역이면 SF를 0으로 하늘 이외의 영역이면 100으로 계산하여 월별, 시간별 SF table을 형성하였다. SVF는 반구형 이미지의 전체 픽셀 개수에 대한 하늘 영역 픽셀 개수의 비율(%)로 계산하였다.
2.4 에너지 발전량 검증 실험방법
태양광 전기차를 실험 경로를 따라 주행하면서 일사량과 태양광 발전량을 측정하였다. 주행 실험은 2024년 11월 21일에 진행했으며, 평균 기온은 약 12.5℃이고 평균 운량이 0으로 맑은 하늘 상태였다. 주행 실험은 오전 9시, 오후 12시, 오후 15시에 진행되었으며, 태양광 모듈을 0°, 15°, 30°, 45°로 경사 각도에 변화를 주어 총 12회 주행하였다. 태양광 전기차는 주행 경로를 평균 15 km/h의 속도로 약 5분간 주행하였다.
이 실험을 통해 실험 시간별 모듈 경사각에 따른 일사량 및 발전량 데이터를 얻을 수 있었다. 일사량 및 발전량은 12회 주행 동안 기록되어 총 12개의 파일이 생성되었고 1초 간격으로 연속적으로 기록되었다. QGIS 소프트웨어를 이용하여 주행 경로를 5 m 간격에 따라 241개 지점을 형성하였고, 각 지점의 일사량, 발전량 측정값을 속성 테이블에 입력하였다. 발전량 예측값과 관측값을 정량적으로 비교하기 위해 예측 지점과 가장 가까운 실험 지점을 검증 지점으로 선정하였다. Fig. 5는 주행 경로상에 형성된 241개의 발전량 측정 지점(흰색 점), 35개의 발전량 예측 지점(빨간 점), 35개의 발전량 검증 지점(파란 점)의 위치를 비교한 그림이다. SAM 소프트웨어를 통해 예측한 발전량은 1월 1일부터 12월 31일까지 시간별로 표시된다.
본 연구에서는 표준기상년 자료에서 11월 중 가장 날씨가 맑은 날의 에너지 발전량을 예측값으로 설정하였고 이를 관측값과 비교하여 예측 정확성을 검증하였다. 예측에 사용된 일사량과 실제 일사량은 절댓값이 서로 다르므로 시계열 패턴의 유사도를 분석하기 위해 코사인 유사도(cosine similarity)를 분석하였다. 코사인 유사도는 두 벡터(예측값과 관측값)의 내적을 각 벡터의 크기 곱으로 나눈 것으로 두 값 사이의 방향 유사성을 평가하는 지표이다. 코사인 유사도는 0과 1 사이의 값을 가지며, 1에 가까울수록 예측값과 관측값의 변화 패턴이 유사하다는 것을 의미한다.

3. 에너지 발전량 예측 결과 및 검증
3.1 모듈 경사각 및 주행 방향 변화에 따른 일사량, 발전량 변화 분석
(1) 9시
모듈 경사각과 방위각 변화에 따라 달라지는 일사량을 주행 시간 조건(9시, 12시, 15시) 별로 분석하였다. Fig. 6은 오전 9시에 주행 실험을 통해 측정된 일사량과 발전량을 보여준다. 먼저 9시에는 태양이 동쪽에 위치할 때 태양광 모듈이 태양을 바라보는 쪽, 즉 서쪽(주행 방향: 225° ~ 315°, 패널 방향: 45° ~ 135°)으로 주행할 때 발전량이 가장 높게 측정됨을 알 수 있다. 또한 모듈 경사각이 0°에서 45°로 커질수록 일사량과 발전량이 높게 측정되었다.
(2) 12시
Fig. 7은 오후 12시에 주행 실험을 통해 측정된 일사량과 발전량을 보여준다. 12시에는 태양이 가장 높게 떠 있는 상태이다. 출발 직후인 동쪽(주행 방향: 45° ~ 135°, 모듈 방향: 225° ~ 315°)으로 주행할 때 일사량이 0°, 15°, 30°, 45°의 순서로 크다는 것을 알 수 있다. 북쪽(주행 방향: 315° ~ 45°, 모듈 방향: 135° ~ 225°)으로 주행할 때 45°, 30°, 15°, 0°의 순서로 일사량이 낮아지는 것을 알 수 있다. 그리고 차량이 서쪽(주행 방향: 225° ~ 315°, 패널 방향: 45° ~ 135°)과 남쪽(주행 방향: 135° ~ 225°, 패널 방향: 315° ~ 45°)으로 주행할 때 다시 0°, 15°, 30°, 45°의 순서로 일사량과 발전량이 높아지는 것을 알 수 있다. 일사량 그래프를 통해 태양광 전기차가 태양 위치의 반대 방향, 즉 모듈이 태양과 마주 보면서 주행할 때 모듈에 입사되는 일사량이 가장 높게 측정되며 모듈 경사각이 클수록 일사량과 발전량이 높아진다는 공통점을 발견하였다. 또한 태양이 남쪽에 위치할 때 차량이 동쪽과 서쪽으로 주행하면 모듈 경사각이 작을수록 일사량과 발전량이 높게 측정됨을 알 수 있었다.
(3) 15시
Fig. 8은 15시에 주행 실험을 통해 측정된 일사량과 발전량을 보여준다. 15시의 경우에는 9시와 반대로 태양의 위치가 서쪽에 떠 있기 때문에 차량이 동쪽으로 주행할 때 일사량과 발전량이 가장 높은 것을 알 수 있다. 그중에서도 모듈 경사각이 45°일 때 일사량과 발전량이 가장 높았으며, 0°일 때 가장 낮았다.
3.2 에너지 발전량 예측값 및 관측값 비교
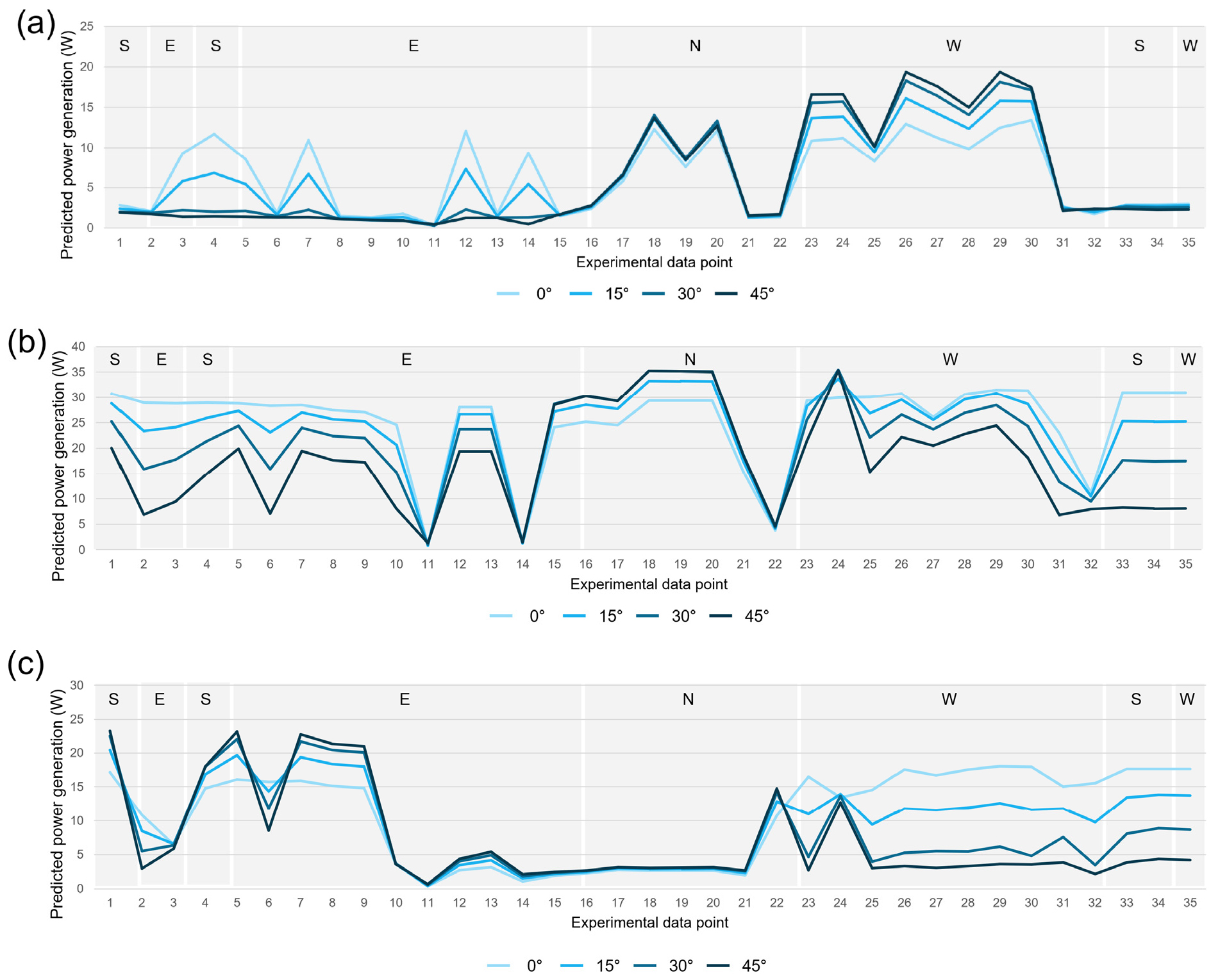
35개 발전량 검증 지점에서 반구형 이미지를 Fig. 9와 같이 촬영하였고 각 지점에서의 에너지 발전량을 예측하였다. Fig. 10은 오전 9시의 발전량 예측값과 관측값을 비교한 그래프이다. 두 그래프의 에너지 발전량 증감 패턴은 모든 주행 지점에서 동일하게 나타났다. 예측값 그래프에서 북쪽과 서쪽으로 주행할 때는 태양광 모듈의 경사각이 45°일 때 발전량이 가장 크고 0°일 때 가장 작은 것으로 나타났다. 반면에 태양을 등지고 동쪽과 남쪽으로 주행할 때는 경사각이 작을수록 발전량이 증가하는 경향을 보였다. 관측값 그래프에서도 북쪽, 서쪽으로 주행할 때는 경사각이 클 때 발전량이 높게 측정되었으며, 남쪽과 동쪽으로 주행할 때는 경사각이 작을 때 발전량이 높게 측정되는 양상을 보였다.
9시에는 차량이 서쪽으로 주행할 때(24 ~ 31번 지점) 태양광 모듈이 태양을 직접 마주하므로 에너지 발전량 예측값과 관측값이 가장 높았다. 12번 지점에서는 건물 아래(11번 지점)를 통과한 후 직달 일사 구역을 주행했음에도 불구하고 낮은 발전량(약 5 W)을 지속하여 예측값과는 다른 패턴을 보였다. 19번 지점에서는 모든 경사각 조건에서 발전량이 높게 예측되었으나 실제 관측값은 30° 경사각에서만 발전량이 높게 관측되었다. 반구형 이미지상으로는 직달 일사 지역으로 분석되었으나 실제로는 도로에 나무 그림자가 발생하여 불규칙한 에너지 발전량을 보였다. 24번 지점 ~ 28번 지점까지도 마찬가지로 나무 그림자에 의해 불규칙한 에너지 발전량을 보였다.
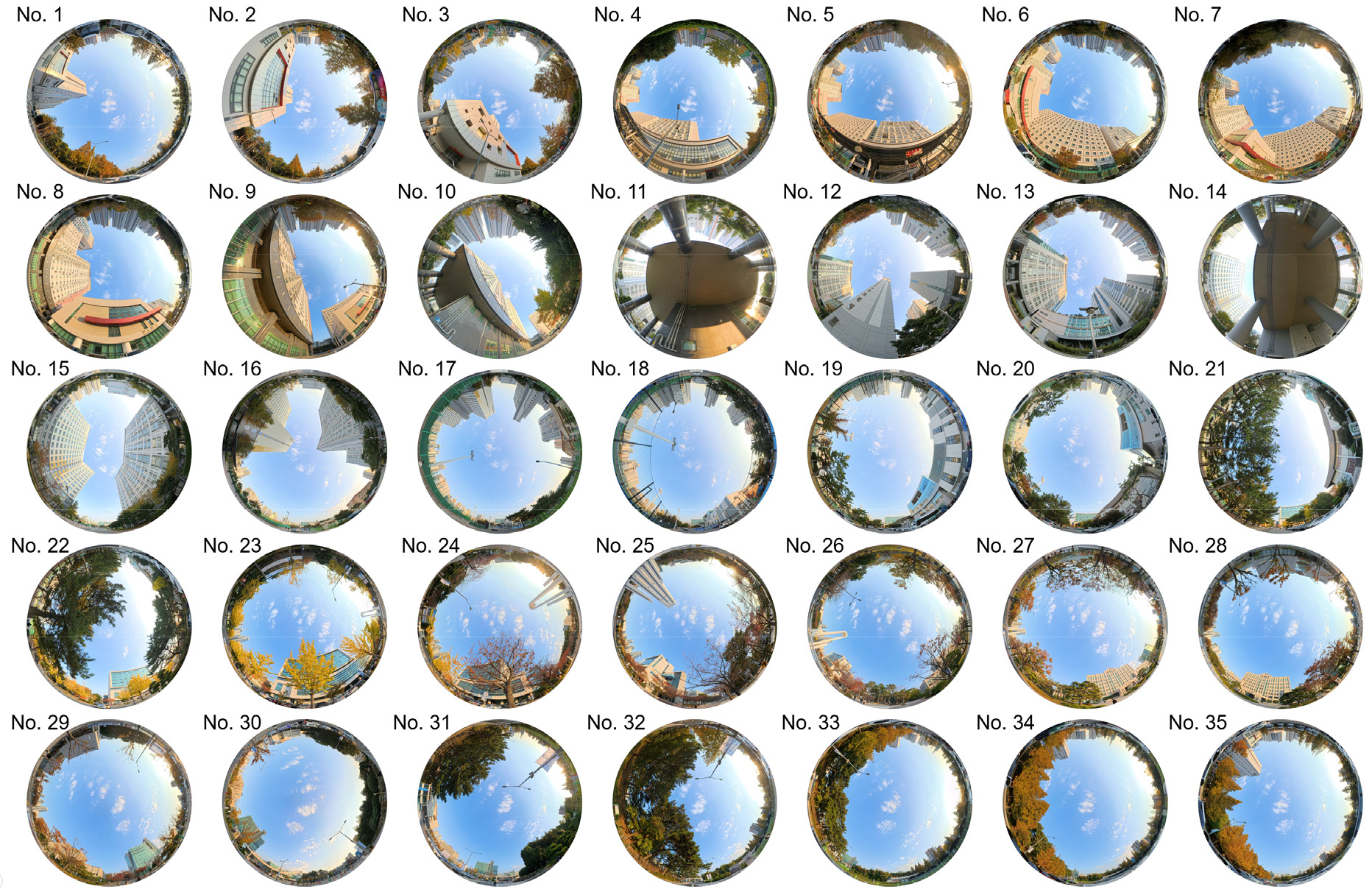
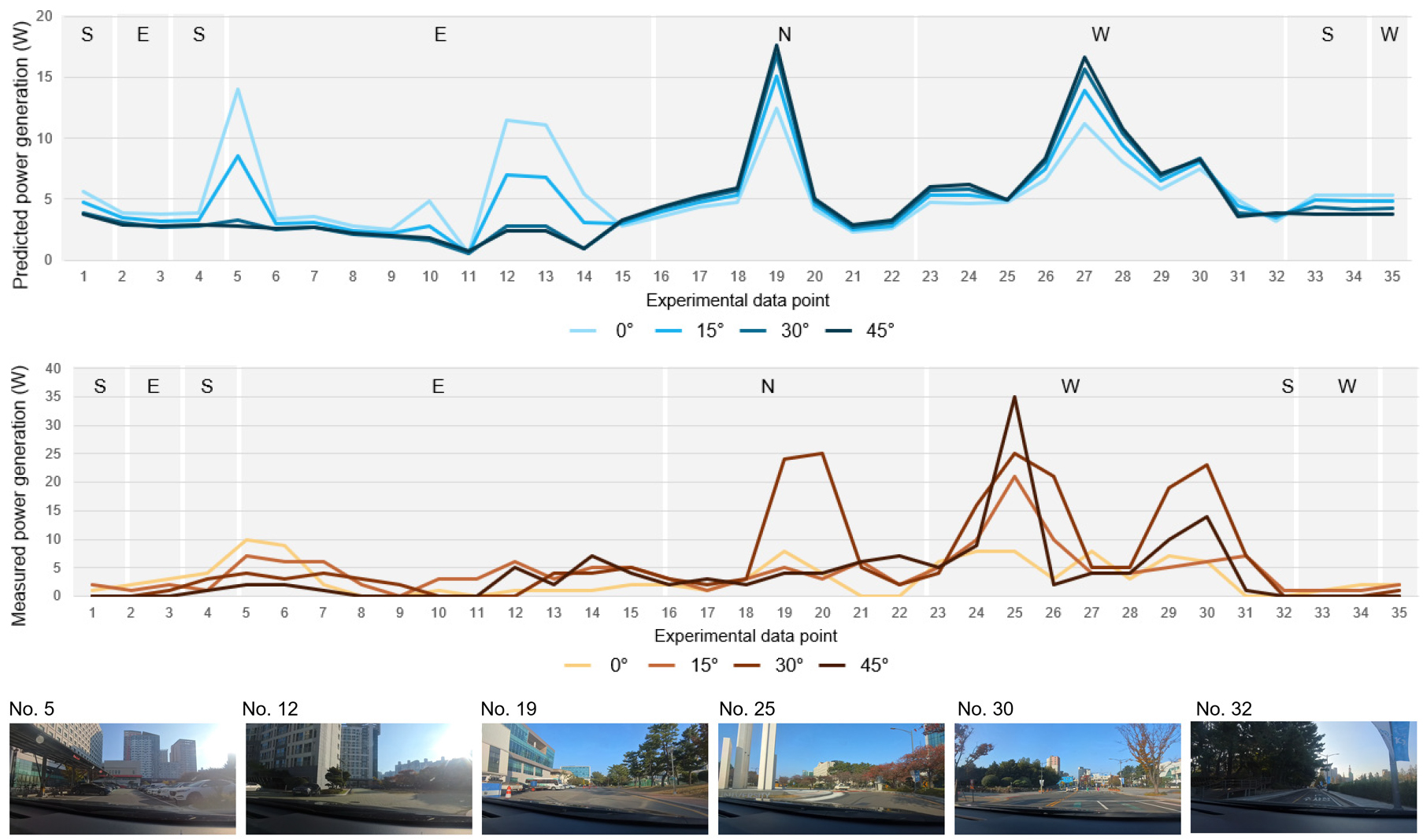
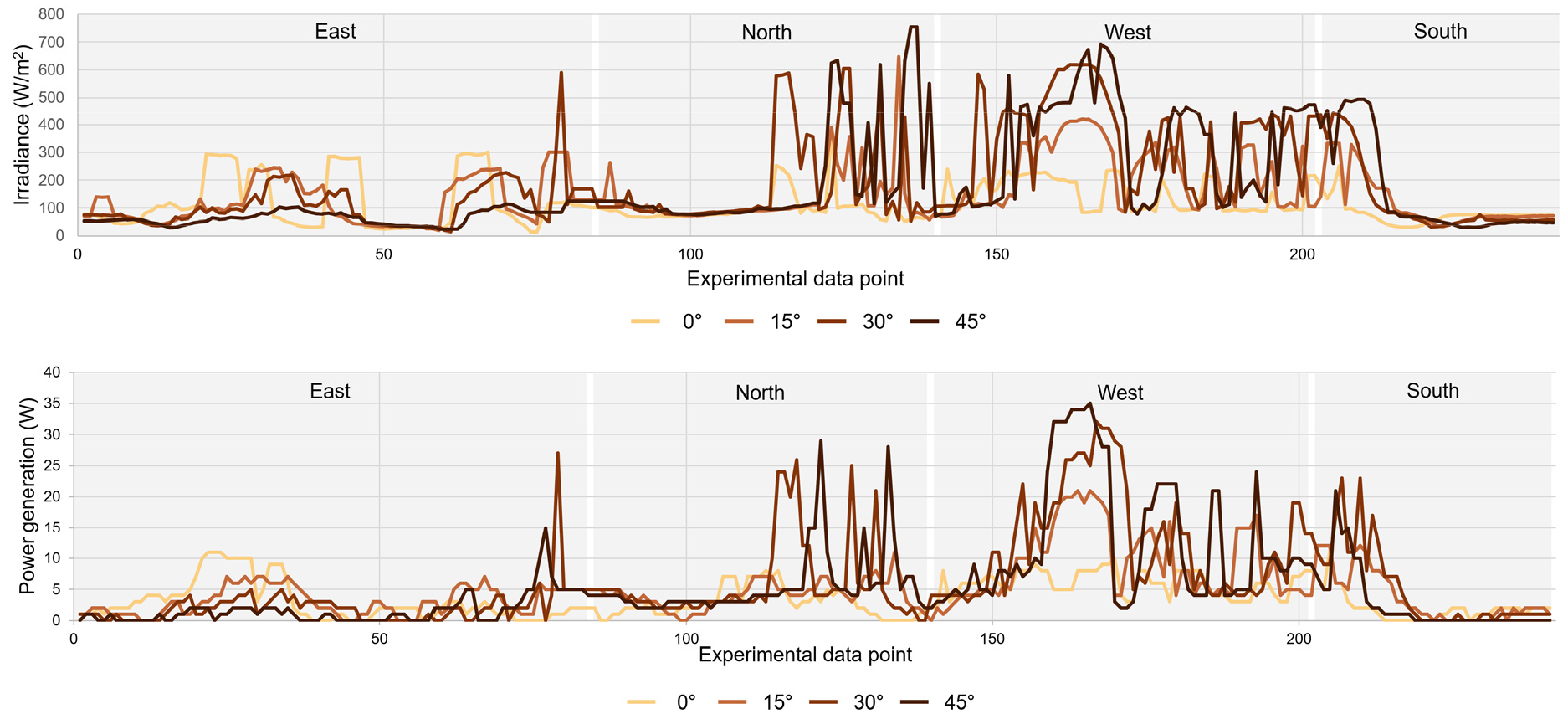
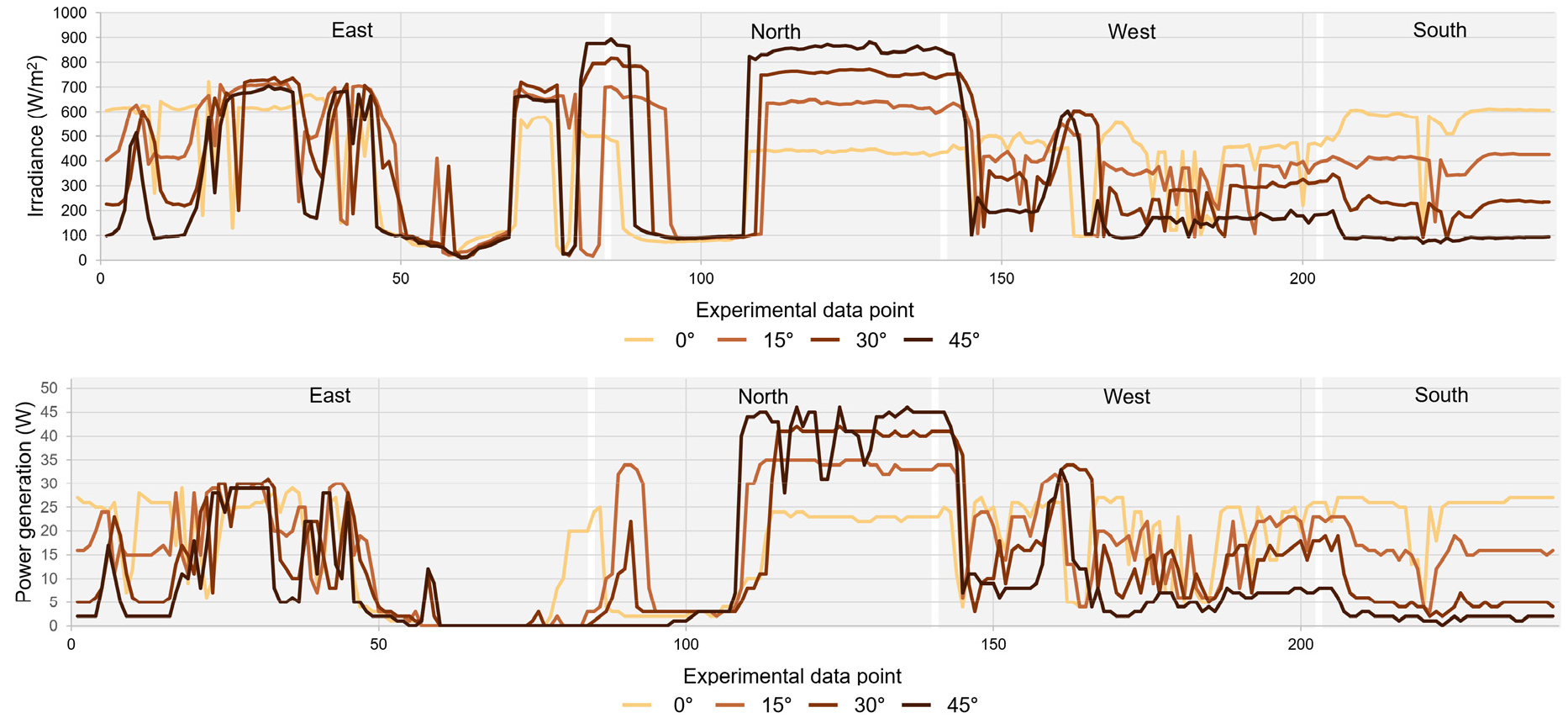
Fig. 11은 오후 12시의 발전량 예측값과 관측값을 비교한 그래프이다. 12시의 경우 북쪽으로 주행할 때 경사각 45°, 30°, 15°, 0°의 순서로 발전량이 높은 것으로 예측되었고, 동, 서, 남쪽으로 주행할 때 경사각이 낮을수록 발전량이 높게 예측되었다. 실제 관측값에서도 북쪽으로 주행하며 태양을 마주 볼 때 경사각이 높을수록 발전량이 높게 측정되었고 그 외 방향에서는 경사각이 낮을수록 발전량이 높게 측정되는 패턴을 보였다.
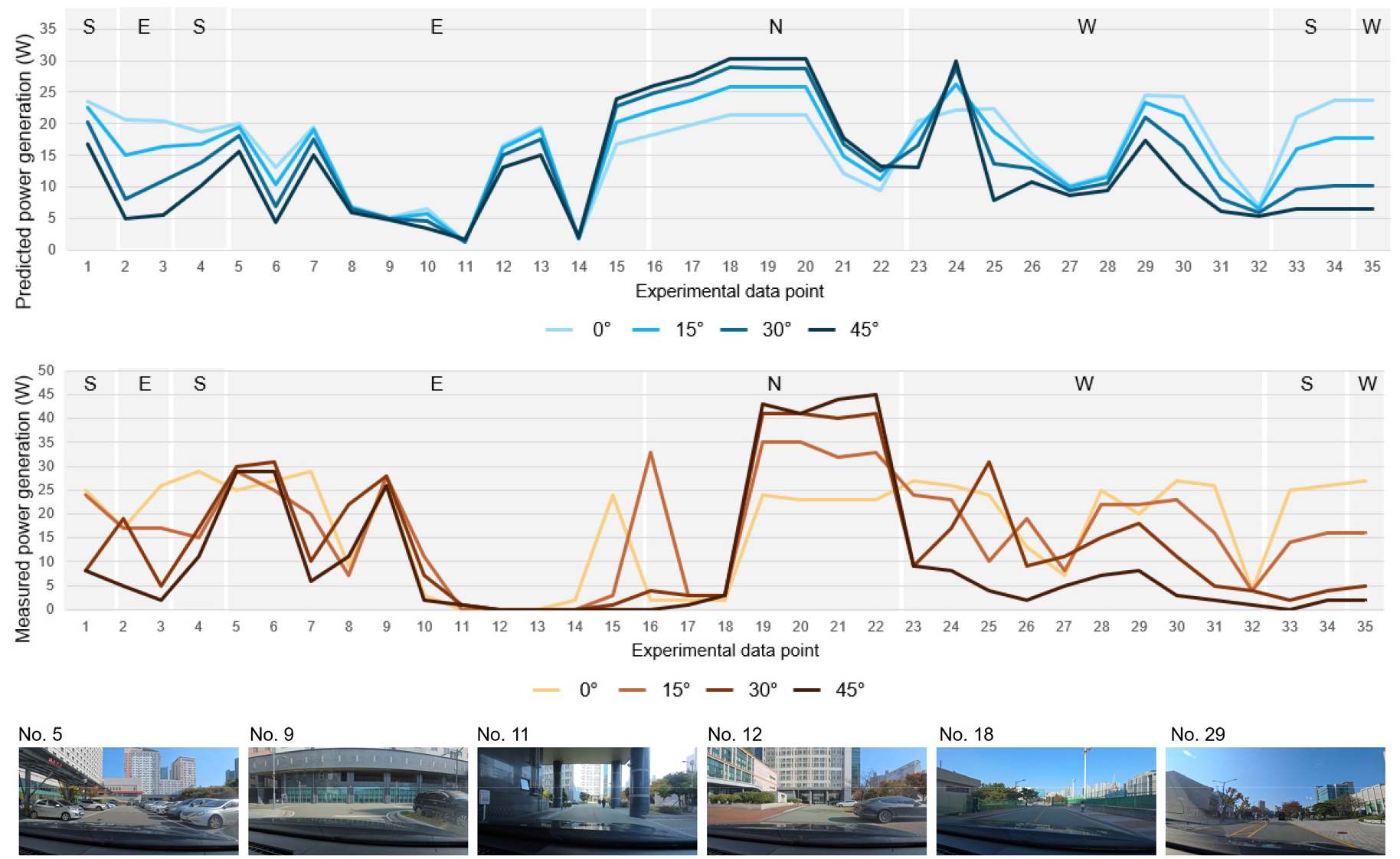
9번 지점에서는 예측값이 낮게 예측되는 경향을 보였으나 실제로는 직달 일사 지역이라 모든 경사각 조건에서 높은 발전량(약 25 W)이 관측되었다. 12번 지점은 오전 9시와 마찬가지로 건물 아래(11번 지점)를 통과한 후 낮은 발전량(0 W)이 지속되는 경향을 보였다. 17 ~ 18번 지점에서는 발전량이 높아지는 것으로 예측되었으나 실제로는 주변의 높은 건물로 인해 직달 일사가 없어 낮은 발전량(약 3 W)으로 관측되었다. 그 외 지점에서는 예측값 변화 양상과 동일한 관측 양상을 보였다.
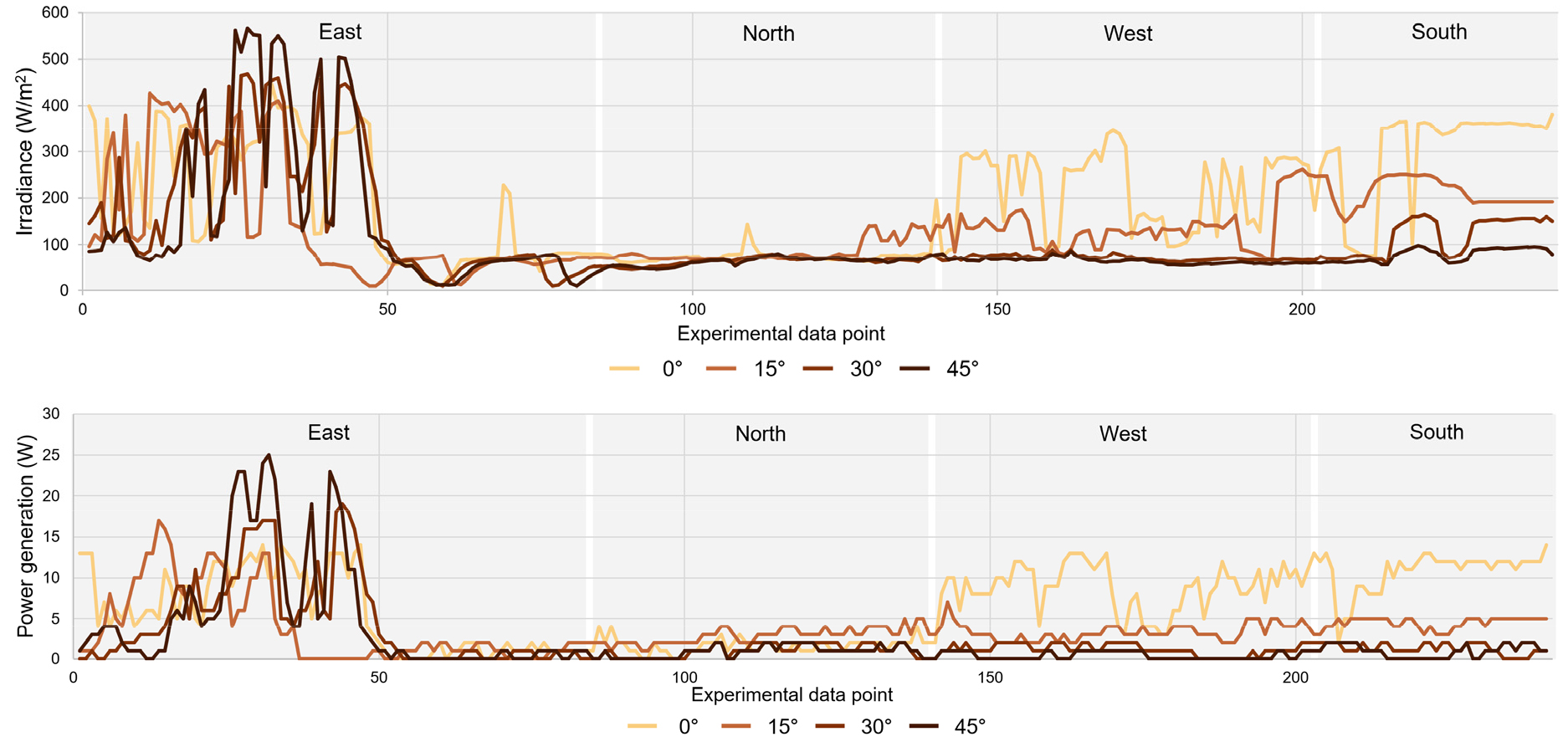
Fig. 12는 오후 15시의 발전량 예측값과 관측값을 비교한 그래프이다. 15시의 경우 태양을 마주 보면서 동쪽으로 주행할 때 발전량이 가장 높고 모듈의 경사각이 클수록 발전량이 높게 예측되었다. 실제 관측값에서도 예측 패턴과 동일하게 동쪽으로 주행할 때 경사각이 높을 때 발전량이 높게 측정되었으며, 태양을 등지면서 서쪽으로 주행할 때 경사각이 낮을수록 발전량이 높게 측정되었다.
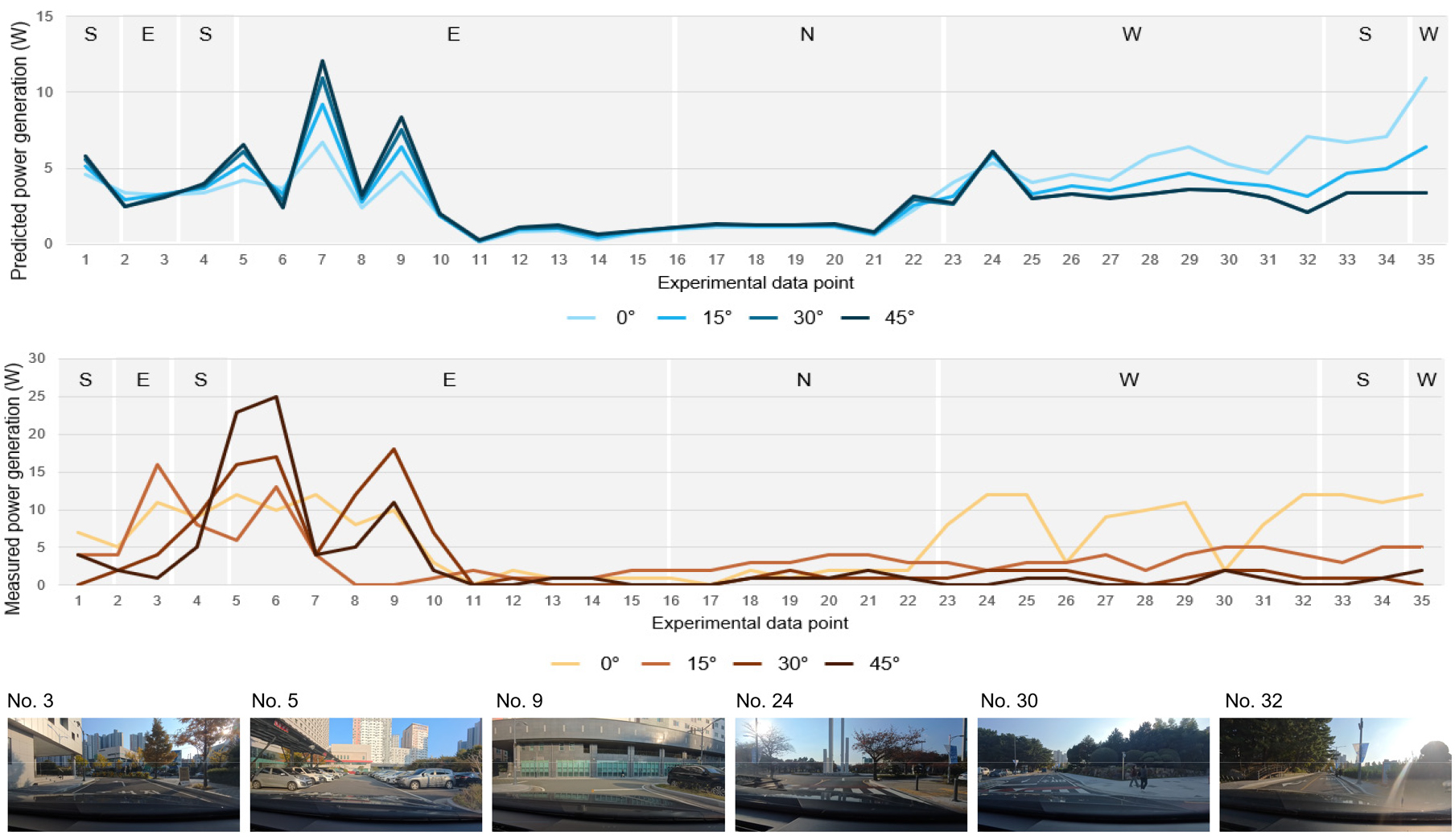
3번과 5번 지점은 나무 그림자에 의해 발전량이 낮을 것으로 예측되었으나 실제 도로에서는 불규칙한 나무 그림자 사이로 직달 일사가 가능하여 높은 발전량(약 15 W)이 측정되었다. 반면에 7번 지점은 직달 일사가 가능한 지역으로 높은 발전량이 예측되었으나 실제로는 나무 그림자가 발생하여 낮은 일사량(약 12 W)이 관측되었다. 22 ~ 35번 지점까지는 나무와 건물에 의한 그림자가 발생하여 대부분의 모듈 경사각 조건에서 낮은 일사량을 기록하였으나 0° 경사각 조건에서 가장 높은 발전량이 관측되었다. 태양광 모듈이 0°일 때 그림자에 의한 직달 일사 저하 영향을 가장 적게 받으며 반대로 태양광 모듈 경사 각도가 커질수록 그림자에 의한 직달 일사 저하 영향을 크게 받는 것을 알 수 있었다.
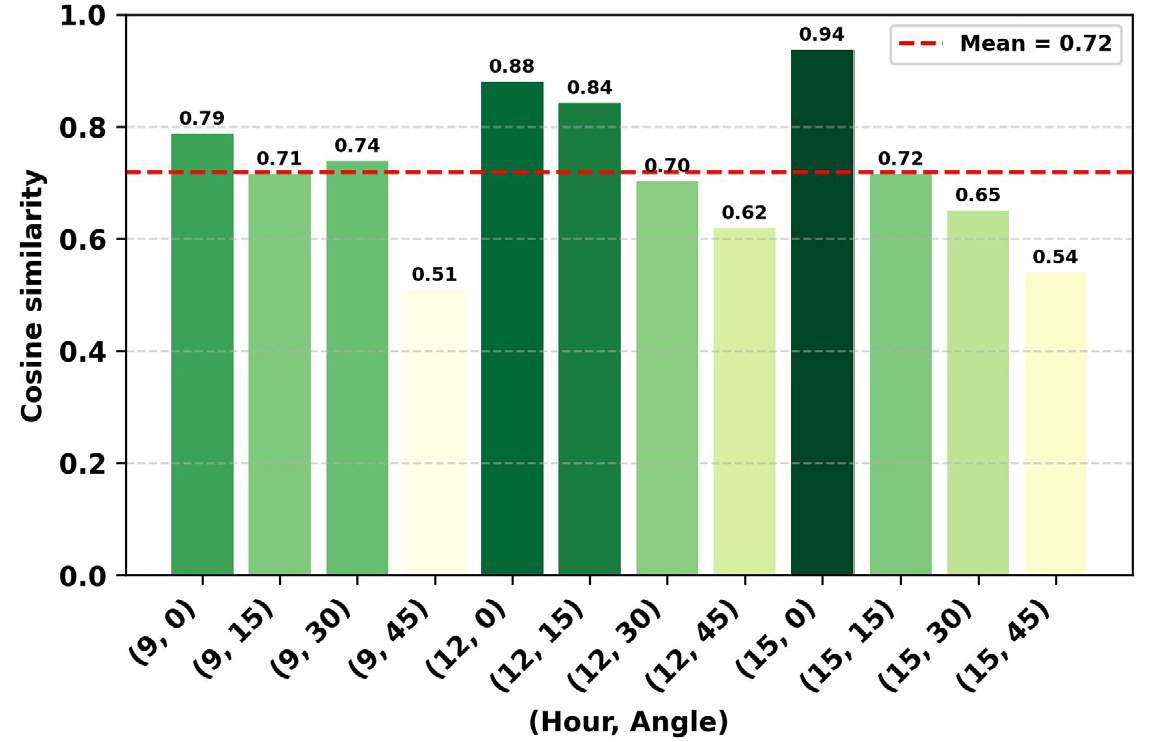
Fig. 13은 예측값과 관측값 사이의 코사인 유사도를 시간과 모듈 경사각 조건별로 가시화한 것이다. 15시에 모듈 경사각이 0°일 때 약 0.94의 가장 높은 유사도를 보였으며, 평균적으로 약 0.72의 유사도를 보였다. 모든 시간에서 모듈 경사각이 0°일 때 유사도가 가장 높고 모듈 경사각이 커질수록 유사도가 점차 낮아지는 것을 알 수 있다. 모듈 경사각이 45°일 때 도로 주변 구조물에 의한 그림자 영향을 가장 많이 받아 절대적인 일사량 변화가 커져 예측 정확도가 크게 낮아지는 것으로 판단된다.
4. 토 의
4.1 봄철 에너지 발전량 분석
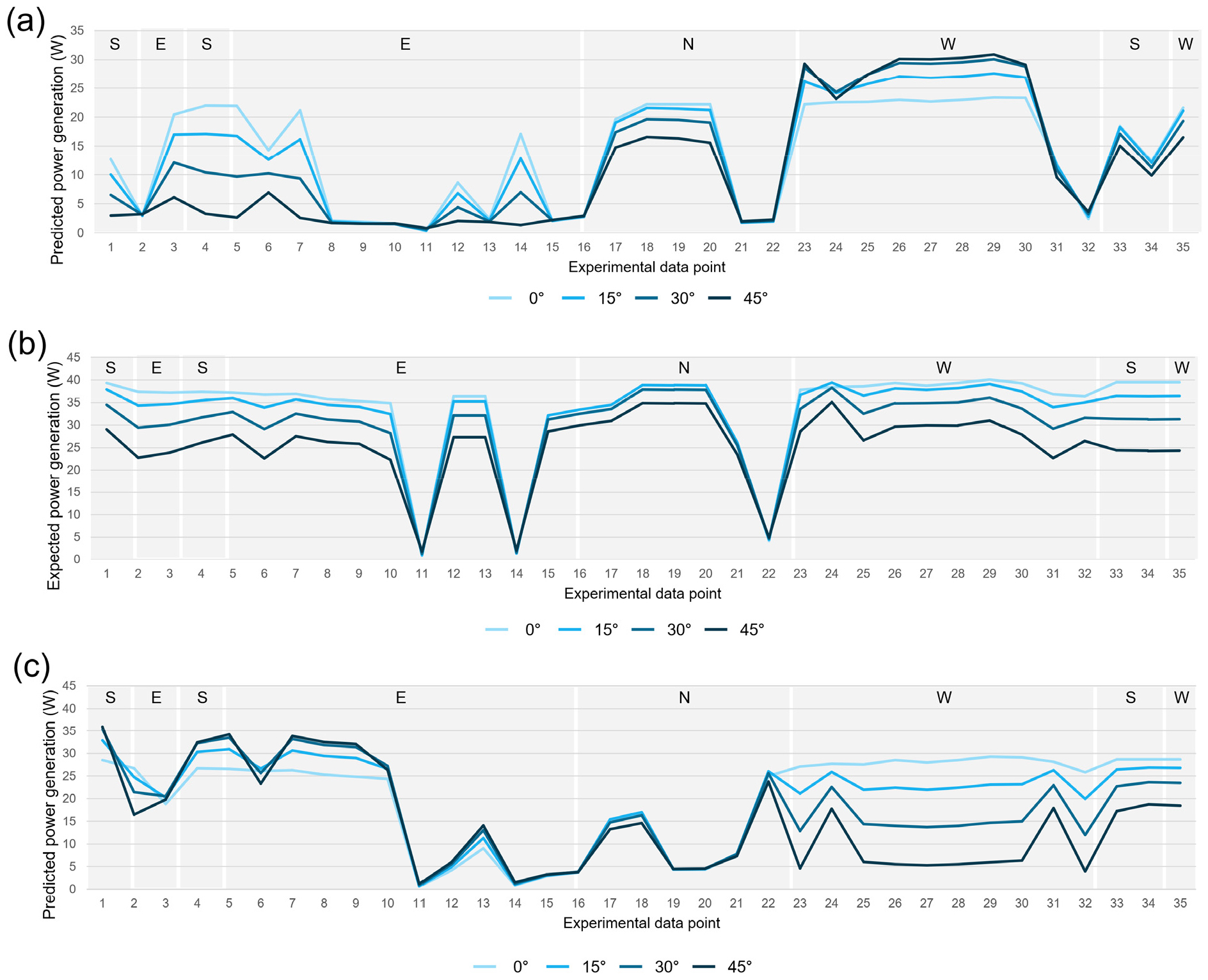
본 연구에서는 실험을 진행한 11월, 즉 겨울의 경우에만 모듈의 경사각 및 주행 방향에 따른 발전량을 예측하고 검증하였다. 3월(봄)과 7월(여름)에 주행 경로를 주행했을 때 달라지는 발전량 패턴을 예측함으로써 계절별 발전량 변화를 분석하였다. SAM 소프트웨어를 통해 예측한 연간 발전량에서 3월과 7월 한 달 동안의 평균 발전량을 35개 지점에 대해 계산하였다. 11월에 태양의 남중고도가 가장 낮고, 3월과 7월로 갈수록 남중고도는 높아진다. 태양의 남중고도에 따라 발전량 그래프의 변화에 차이가 생기는 것을 확인하고자 하였다. Fig. 14는 3월 한 달 동안 오전 9시, 오후 12시, 오후 15시에 대해 예측한 평균 발전량 그래프이다. 3월의 9시의 경우에는 11월의 9시와 유사하게 북쪽, 서쪽으로 주행할 때 경사각 45°, 30°, 15°, 0°의 순서로 발전량이 크다는 것을 확인하였다. 15시는 11월과 같이 동쪽으로 주행할 때 45°의 예측 발전량이 가장 컸고 12시도 11월과 같았다.
4.2 여름철 에너지 발전량 분석
여름의 평균 발전량 패턴은 겨울과 봄의 결과와는 다르게 분석되었다(Fig. 15). 9시의 경우에는 서쪽으로 주행할 때만 패널의 각도가 45°일 때의 예측 발전량이 가장 컸고, 15시도 동쪽으로 주행할 때만 45°의 예측 발전량이 가장 컸다. 그리고 12시의 경우에는 주행 방향에 상관없이 태양광 모듈이 0°일 때 발전량이 가장 크고 45°일 때 가장 작게 예측되는 것을 알 수 있었다. 즉 태양 남중고도가 가장 높은 여름 12시에는 태양광 모듈을 경사 없이 0°로 설치할 때 최대 발전을 할 수 있는 것으로 판단된다.
태양의 고도가 낮을 때(봄, 가을, 겨울철, 여름철의 오전, 오후의 경우) 차량이 태양을 마주 보면서 주행한다면 모듈의 경사각이 높을수록 발전량은 증가하는 경향을 보인다. 반면에 여름철의 정오와 같이 태양의 고도가 최대로 높을 때는 모듈의 경사각이 낮을수록 입사각이 작아져 태양광 모듈에 입사하는 일사량이 많아 발전량이 높아지는 것으로 판단된다. 여름철은 그림자에 의한 일사량 저하 영향이 있더라도 일사량의 절댓값이 커 발전량이 다른 계절에 비해 높게 분석되었다.
4.3 연구의 시사점 및 제언
태양광 모듈을 차량의 지붕과 후면 유리에 여러 경사 각도로 설치한다면 주행 방향, 주행 시간, 계절에 따라 각 모듈(셀)에 입사되는 일사량과 발전량 크기에 차이가 발생하는 것을 알 수 있었다. 또한 건물, 나무 그림자에 의한 일사량 저하가 모듈 경사각에 따라 다르게 발생하는 것을 알 수 있었다. 태양광 전기차의 에너지 발전량을 예측하기 위해서는 경사각이 동일한 모듈(셀) 단위로 일사량 및 발전량을 예측하고 합산하는 것이 효과적일 것이다. 만약 태양광 모듈의 최적 설치 위치와 경사 각도를 결정한다면 태양의 남중고도가 높고 일사량이 높은 12시에 발전량이 높았던 0° 경사로 차량 지붕에 설치하는 것이 유리하다. 나무는 도로에 불규칙한 그림자를 형성하여 태양광 발전량 예측 정확도를 낮췄다. 본 연구에서는 반구형 이미지 내 나뭇잎, 나뭇가지가 인식되면 직달일사량 저하 비율(SF)을 100%로 할당하여 낮은 발전량을 예측하도록 했다. 이 방식은 불규칙한 나무 그림자 영향을 정확히 산정하는 것이 어렵다고 생각되며 반구형 이미지 내 나무의 형상과 분포를 고려한 새로운 일사량 예측 방식의 적용이 요구된다. 필로티 구조의 건물에 진입한 후 진출했을 때 태양 직달 일사가 가능함에도 발전량이 0 W로 짧은 시간 유지되어 예측값과 관측값에 큰 차이가 발생했다. 필로티 건물이나 지하차도와 같이 직달 및 산란 일사가 거의 없는 구역에 진출할 때 일정 시간 동안 낮은 발전량이 유지되도록 예측 방식을 변경할 필요가 있다. 주행 실험이 진행됐던 11월은 일사량이 절대적으로 낮아 단시간 주행하는 동안에는 전기차의 주행거리를 늘릴 수 있을 만큼 충분한 에너지 발전이 어렵다고 판단된다. 반면에 여름철은 시간에 상관없이 일사량이 높고 경사각과 주행 방향에 따른 발전량 차이도 적기 때문에 주행시 충분한 배터리 충전이 가능할 것이다. 이는 전기차 연비를 높이는 효과로 작용할 수 있을 것이다.
5. 결 론
본 연구에서는 태양광 전기차의 모듈 경사각과 주행 방향 조건에 따른 에너지 발전량의 차이를 예측하고 이를 실험적으로 검증하였다. 국립부경대학교 대연캠퍼스 내 주행 도로를 실험 경로로 설정하였고, 35개 지점에 대해 에너지 발전량을 예측하였다. 태양광 전기차를 이용하여 주행 실험으로 측정한 발전량 패턴과 예측값 패턴을 비교하였다. 태양광 모듈이 태양을 마주 보는 방향으로 주행할 때 일사량과 발전량이 모두 증가하고 모듈의 경사각이 클수록 발전량도 증가하는 양상을 보였다. 반면에 태양광 모듈이 태양을 마주 보지 않는 방향으로 주행할 때 모듈의 경사각이 작을수록 발전량이 증가하였다. 모든 검증 지점에 대해 예측값과 관측값 사이의 시계열 패턴 유사도를 분석한 결과 평균 약 0.72의 유사성을 보였다. 계절 변화에 따른 에너지 발전량을 예측한 결과 태양 남중고도 변화와 일사량 변화로 인해 주행 방향과 모듈 경사각 조건에 따른 발전 패턴에 차이가 발생하는 것을 확인하였다.
본 연구의 방법과 결과는 태양광 전기차를 운행할 때 가장 효율적인 경로, 즉 배터리 충전량과 소모량의 차이가 가장 큰 경로로의 운행을 추천하는 내비게이션 알고리즘을 개발하는 데 활용될 수 있다. 특히 전기차 외관과 후면 유리에 여러 경사 각도로 태양광 모듈이 부착되었을 때 차량의 주행 방향과 주행 시간(계절)에 따라 달라지는 발전량을 예측하는 데에 사용될 수 있다. 360° 카메라를 활용하여 반구형 이미지를 촬영하고 도심지 도로의 그림자 영향을 고려하는 방법을 도로 전체로 확장하여 태양광 발전량을 예측함으로써 최적의 주행 경로를 제시할 수 있을 것이다. 내비게이션은 운전자에게 태양광 모듈별 실시간 일사량 및 발전량 정보를 색상과 수치로 가시화하여 안내할 수 있다. 또한 운전자에게 도착지까지 주행하는 동안의 태양광 모듈별 발전량 예측 정보, 전체 발전량, 배터리 충전량 및 소모량을 제시할 수 있을 것이다. 더 나아가 전기차의 예상 연비를 예측할 수 있을 것으로 기대한다. 해당 내용은 본 연구의 후속 연구로 진행될 것이며 주행 실험을 통해 정확도를 검증할 것이다.
본 연구에서는 지형 경사가 거의 없는 평지에서 주행 실험을 수행하였고 태양광 모듈의 경사 각도를 빠르게 조절하면서 동일한 시간대에 실험하기 위하여 작은 규모의 태양광 모듈로 짧은 시간 주행하였다. 이에 지형 경사에 의해 모듈 경사각의 변화를 고려하지 못했고 태양광 발전량의 절대적인 크기가 낮게 측정되어 전기차의 운행 거리를 늘릴 만큼 충분한 배터리 충전을 하지 못했다. 향후에는 경사 지역을 주행하면서 모듈 경사각 변화를 고려할 것이며, 차량 외관 여러 면에 충분한 크기의 태양광 모듈을 설치하고 도심지 도로를 장시간 주행하면서 배터리 충전량과 전기차 연비를 예측하고 관측하고자 한다.
