

1. 서 론
베네시안 블라인드는 수평 슬랫 구조를 가진 차양 시스템으로 외부로부터 유입되는 복사열과 가시광선을 효과적으로 조절할 수 있고, 조망 및 프라이버시 확보가 가능해 주거 및 상업 공간에서 널리 사용되고 있다1,2). 베네시안 블라인드는 수동 제어와 자동 제어 방식으로 구분되어 작동된다. 시중에 보급되는 수동 및 전동 블라인드는 대부분 수동 방식으로 제어된다. 이 방식은 재실자가 차양 조절이 필요한 시점에 직접 명령을 내리는 방식으로, 재실자가 차양 장치의 상태와 주변 온열 및 빛환경을 스스로 인식하며 리모컨 또는 조절 끈(lift/tilt cord)으로 차양을 제어한다. 리모컨을 사용하는 전동 차양의 경우 내부적으로 설정된 제어 값(모터 회전수)에 따라 슬랫 각도가 제어된다. 일반적으로 제조사는 슬랫 각도 자체가 아닌, 제어 스텝(step)을 제공하고, 사용자는 이를 설정하여 차양 각도를 조절할 수 있도록 한다. 즉, 사용자 입력 값에 따른 슬랫 각도의 정량적 정보를 제공하지는 않는다. 수동 제어 방식의 경우 사용자가 눈으로 확인하며 만족되는 차폐 수준에서 스텝 단계를 설정하면 되지만, 향후 패시브 시스템의 자동제어 또는 BEMS (Building Energy Management System) 및 MPC (Model Predictive Control) 적용을 고려하면 차양 각도에 대한 정량적 정보는 중요하다.
베네시안 블라인드를 적용한 선행 연구들은 주로 슬랫 각도 변화에 따른 실내 환경 및 에너지 영향에 대하여 연구가 진행되었다. 실내 냉난방 부하에 따른 영향3)과 이를 이용한 자동 제어 전략이 제안되었다4). 또한 블라인드의 슬랫 높이와 각도 조절에 따른 실내 조도 분포에 관한 연구1,5)와 최적화된 슬랫 각도 제어 전략에 따른 에너지 성능 평가6) 등, 베네시안 블라인드를 적용한 실내 열환경7) 및 빛환경8) 연구에 집중되어 있다. 특히 Rhee and Jung의 연구9)에서는 슬랫 각도가 40도에서 50도로 바뀔 때 각도 변화에 따라 조명 에너지 소비가 약 4.9% 절감되는 것을 확인되었다. 기존 연구들은 차양의 자동 제어가 실내 환경 개선과 에너지 절감에 기여할 수 있음을 보여주었다.
차양의 자동 제어가 모델 예측 제어(Model Predictive Control)10)나 디지털 트윈(Digital Twin)기반으로 실제 건물에 적용되기 위해서는, 시뮬레이션에서 설정한 차양의 각도가 실제 재실 환경에서 동일한 재현성을 가지는지 검증이 필요하다. 이에 본 연구에서는 전동 베네시안 블라인드의 제어 입력값에 따른 슬랫 각도의 정확도를 반복 측정을 통해 정량적으로 분석하였다. 실측 실험을 통해 제어 입력값에 따른 슬랫 각도의 오차 범위와 정회전과 역회전에 따른 슬랫 각도 편차를 비교 분석하였다.
2. 베네시안 블라인드의 구성 요소 및 작동 메커니즘
베네시안 블라인드는 수평으로 배열된 다수의 슬랫으로 구성되며 슬랫을 상하로 이동시키거나 회전시켜 일사 차폐와 실내 조도 등을 능동적으로 조절하는 차양 시스템이다. Fig. 1(a)은 베네시안 블라인드의 정면 구조와 주요 구성 요소이다. 주요 구성 요소는 외부 일사를 차단하거나 실내로 유입되는 자연광을 조절하는 요소인 슬랫(slat), 슬랫의 승강 동작을 제어하는 사다리 끈인 리프팅 테이프(lifting tape, Fig. 1(b)), 슬랫의 회전 각도를 조절하는 틸팅 테이프(tilting tape, Fig. 1(c)), 외부 제어 신호를 수신하여 모터 구동을 제어하는 수신기(receiver), 회전력을 전달하는 중심 축인 샤프트(shaft), 모터의 회전 동작을 조절해주는 기어 박스(gear box), 전체 블라인드 시스템의 회전 및 승강을 구동하는 전동 모터(motor) 등으로 구성된다. 이와 같이 각 구성 부재는 슬랫의 승강, 회전 동작을 유기적으로 연계하여 베네시안 블라인드의 기본 작동 메커니즘을 형성한다.
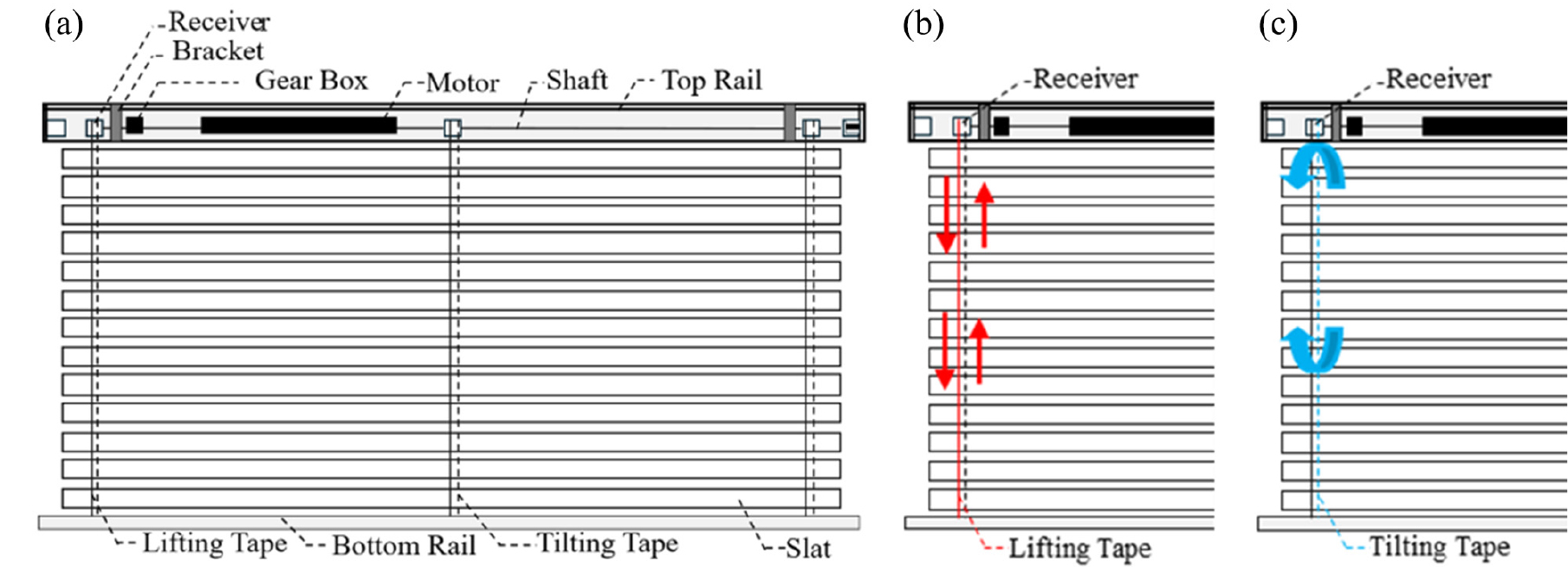
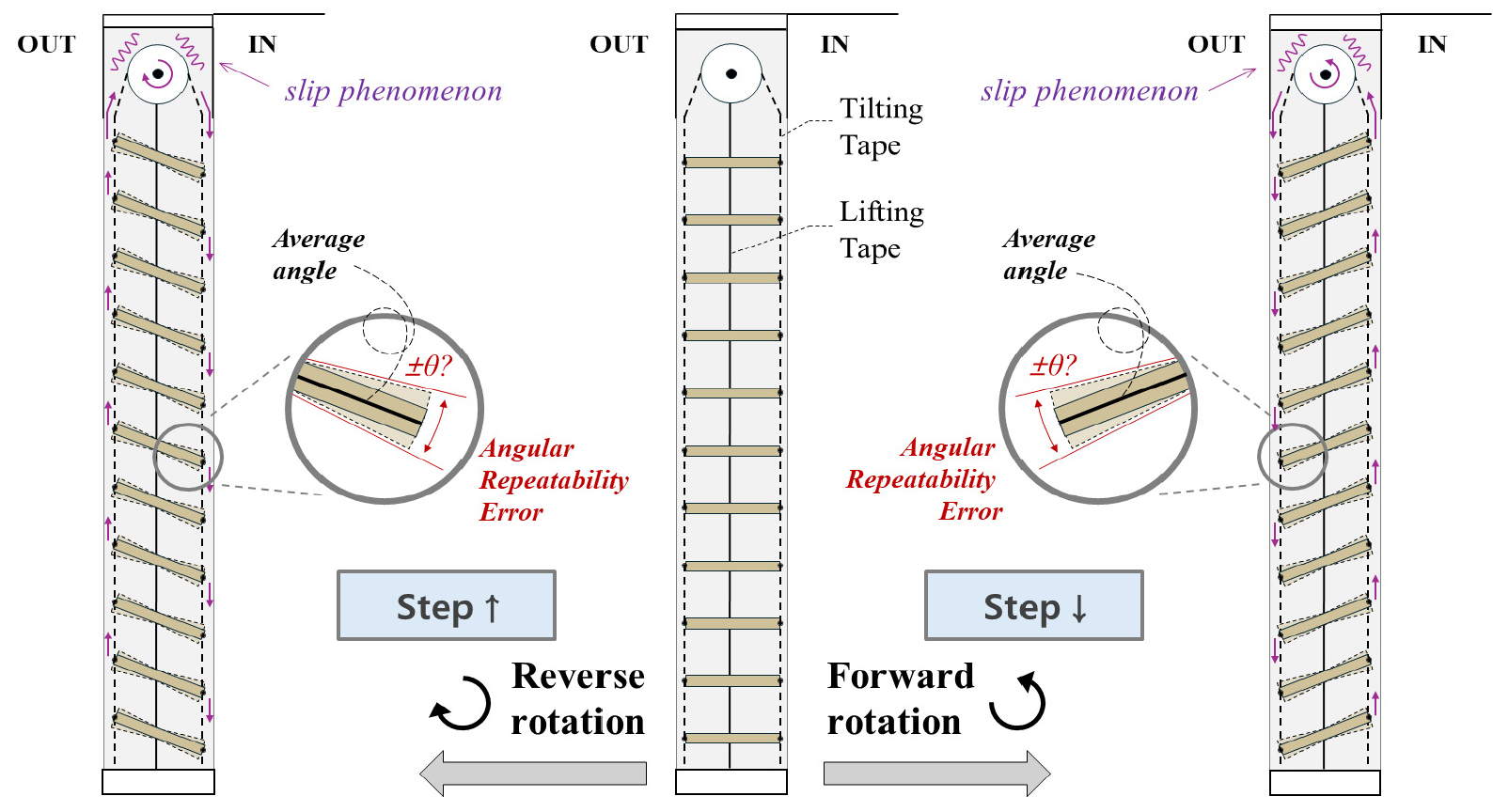
베네시안 블라인드의 슬랫 각도 제어방식은 내부적으로 설정된 기계적 메커니즘에 따라 작동된다. 리프팅 테이프의 상하 동작에 의해 차양의 각도가 조절되며, 리프팅 테이프는 특정 간격으로 구분된 모터의 회전수에 따라 동작한다. 일반적으로 사용자가 설정하는 차양의 제어 스텝(step)은 차양의 각도를 결정하는 것이 아닌 모터의 회전 수를 결정하도록 코드화 되어 있다. 전동 베네시안 블라인드의 경우, 슬랫 각도에 대한 정량적 정보가 제공되지 않는 경우가 많아 실제 제어 값을 사전에 알기 어렵다. 또한 동일한 제어 스텝 혹은 슬랫 각도를 입력하더라도 정회전(forward)과 역회전(reverse) 과정에서 슬랫 각도가 다르게 나타나는 현상이 발생할 수 있다. 이러한 현상은 모터의 작동 메커니즘 내에서 발생하는 기계적인 현상으로 회전수의 차이 또는 회전 각도의 차이를 발생시킨다. 이러한 현상을 관련 분야에서는 슬립 현상(slip phenomenon)으로 부르고 있다(Fig. 2). 이러한 슬립 현상에 따른 슬랫 각도 편차를 정량적으로 검토한 연구는 미흡한 실정이다. 따라서 본 연구에서는 실측을 통해 정회전과 역회전에 따른 슬랫 각도를 정량적으로 분석하였다.
3. 실험 및 분석
3.1 실험개요
본 연구에서는 전동 베네시안 블라인드를 대상으로 동일한 제어 스텝에 따른 슬랫 각도의 변화를 반복 실측하여 분석하는 것을 목적으로 한다. 실험에 사용된 베네시안 블라인드는 전동 제어 방식으로 총 13단계의 스텝 제어 입력이 가능한 제품을 선정하였으며 각 스텝에 대해 정회전 및 역회전 조건을 입력하여 스텝을 총 60회 반복 측정하였다. 슬랫 각도는 블라인드 측면을 일정한 위치에서 촬영한 후 촬영 이미지를 분석하여 슬랫 각도를 산정하는 방식으로 측정하였다(Fig. 3).
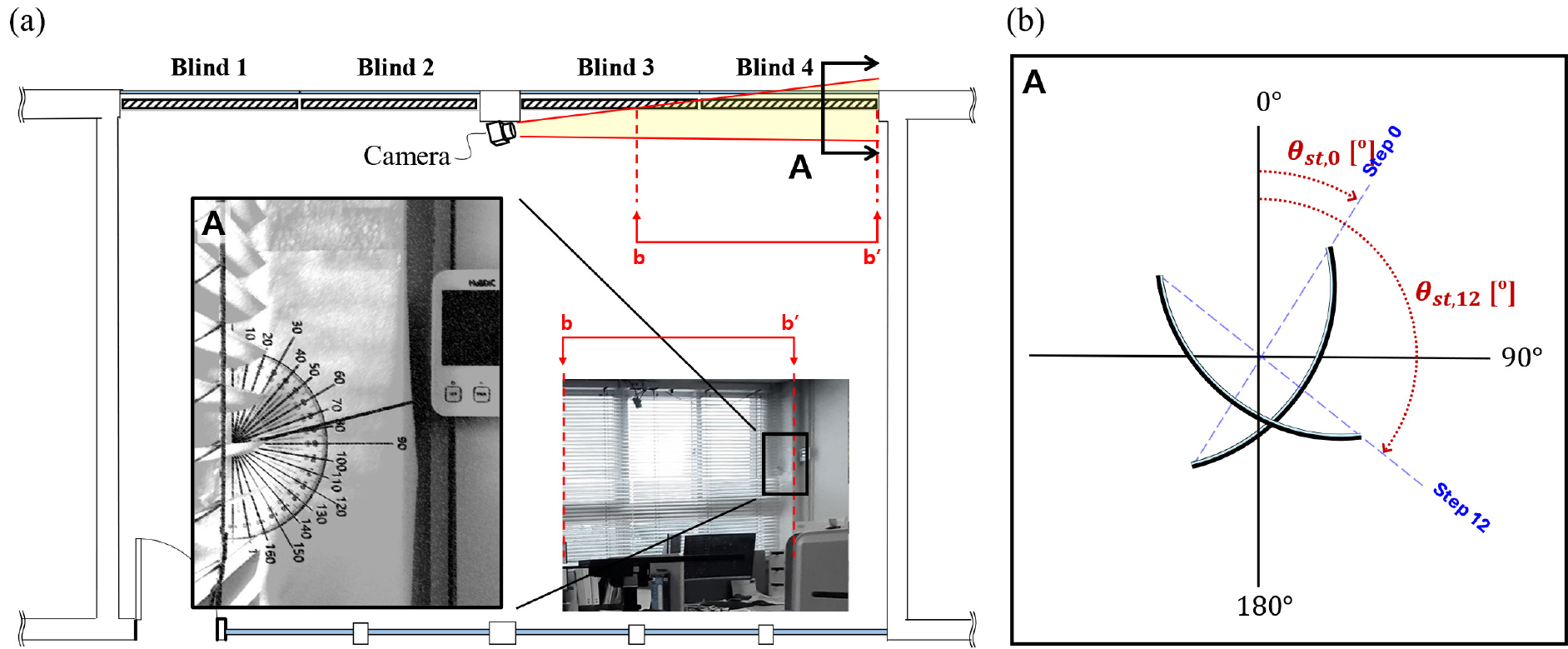
Table 1은 실험에 사용된 베네시안 블라인드 사양이다. 베네시안 블라인드 제어 시나리오는 Table 2와 같다. 본 연구는 제어에 따른 실내 환경을 평가하는 것이 아니므로 제어 시나리오는 실내 환경에서 발생할 수 있는 상황을 재현하기 위한 것이 아닌, 차양 제어 값의 재현성 검토를 목적으로 한다. 이를 위해 차양 모터의 정회전, 역회전, 교차 회전 등 다양한 회전 방식을 구성하는 데 초점을 두었다. 대상 블라인드는 제어 스텝을 제공하며, 스텝별 차양의 각도는 제공하지 않는다. 그러므로 스텝별 차양 각도는 반복 측정을 통한 차양 각의 평균값으로 도출하였다. 초기 블라인드를 완전 폐쇄 상태에서 제어 스텝을 0단계로 설정한 후 스텝 0단계에서 12단계까지 정회전 방향으로 연속 제어하면서 각 단계에서 슬랫 각도를 측정하였다. 다시 제어 스텝을 12단계에서 0단계까지 역회전 방향으로 연속 제어하면서 동일하게 측정하였다. 이후에는 정회전과 역회전이 교차되도록 제어를 반복 측정하였다. 마지막으로, 정회전과 역회전을 교차 제어하여 슬랫 각도를 측정하였다.
Table 1
Experimental control specification
| Control parameter | Specification |
| Control type | Motorized control |
| Control step | 13 steps (step 0 ~ step 12) |
| Control directions | Forward / Reverse |
Table 2
Control directions and step scenarios for each control method
3.2 제어값에 따른 슬랫 각도 분석
동일한 제어 스텝 입력에 대해 정회전과 역회전에서 측정된 슬랫 각도 데이터를 정량적으로 분석하였다. Fig. 4는 제어 스텝 0단계부터 12단계까지의 각 단계에 대해 측정된 슬랫 각도의 분포를 각각 정회전(Fig. 4(a)) 과 역회전(Fig. 4(b))으로 구분한 결과를 나타낸다. 전체적으로 정회전과 역회전 조건에서 스텝이 증가함에 따라 급격히 증가한 후 점차 완만해지는 형태를 보였다. 정회전에서는 평균 슬랫 각도가 스텝 0단계에서 45.1°, 스텝 12단계에서 121.2°로 증가하였으며, 역회전에서는 스텝 0단계에서 42.6°, 스텝 12단계에서 118.4°로 증가하는 경향을 보였다.
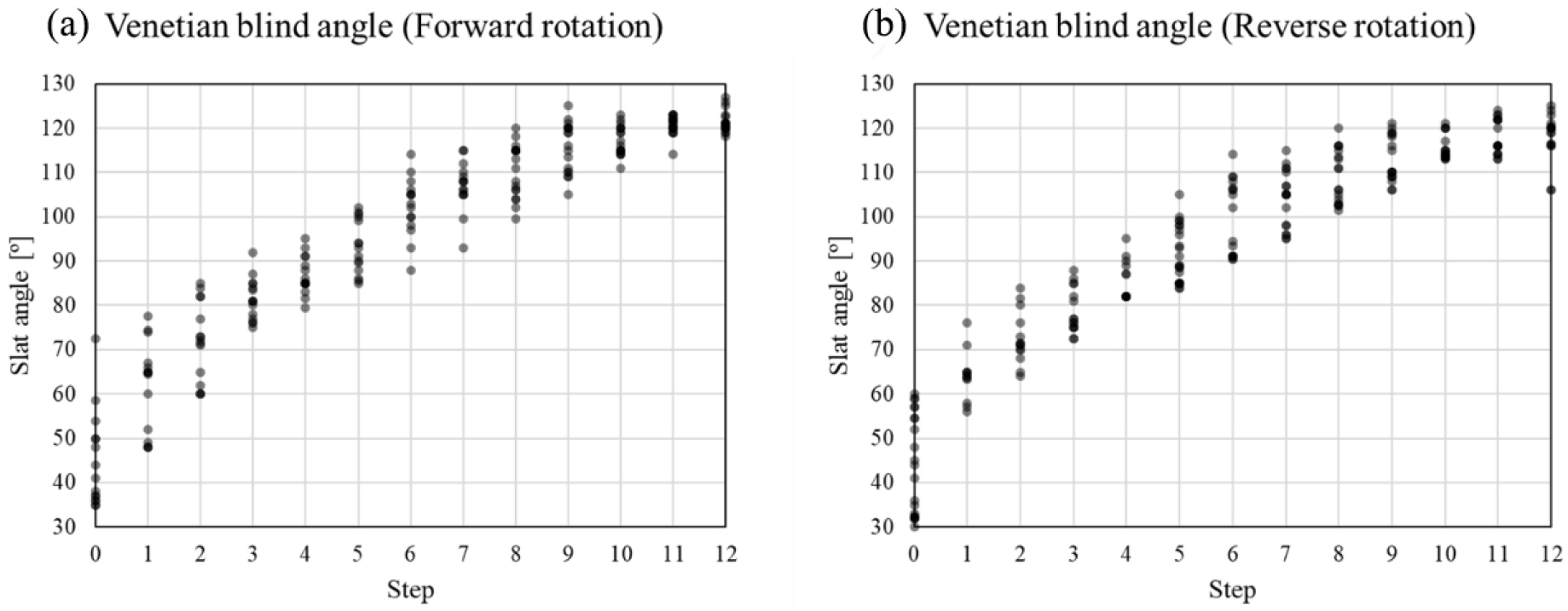
Fig. 5는 정회전과 역회전을 교차 반복 측정된 슬랫 각도를 제어 스텝별로 모두 정리한 결과이다. 전체적으로 슬랫 각도는 스텝 증가에 따라 증가하는 경향을 보였다. 초기 스텝 구간인 0 step에서 3 step까지는 슬랫 각도가 급격히 증가하고 이후 스텝에서는 각도 증가 폭이 완만해지는 경향이 확인되었다. 교차 반복의 조건에서는 스텝 0단계에서 34.6°에서 스텝 12단계에서 120.2°까지 증가하는 경향을 보였다. 정회전과 역회전, 교차 회전 조건에서 측정된 슬랫 각도를 제어 스텝별로 모두 정리한 결과는 다음과 같다(Fig. 6).
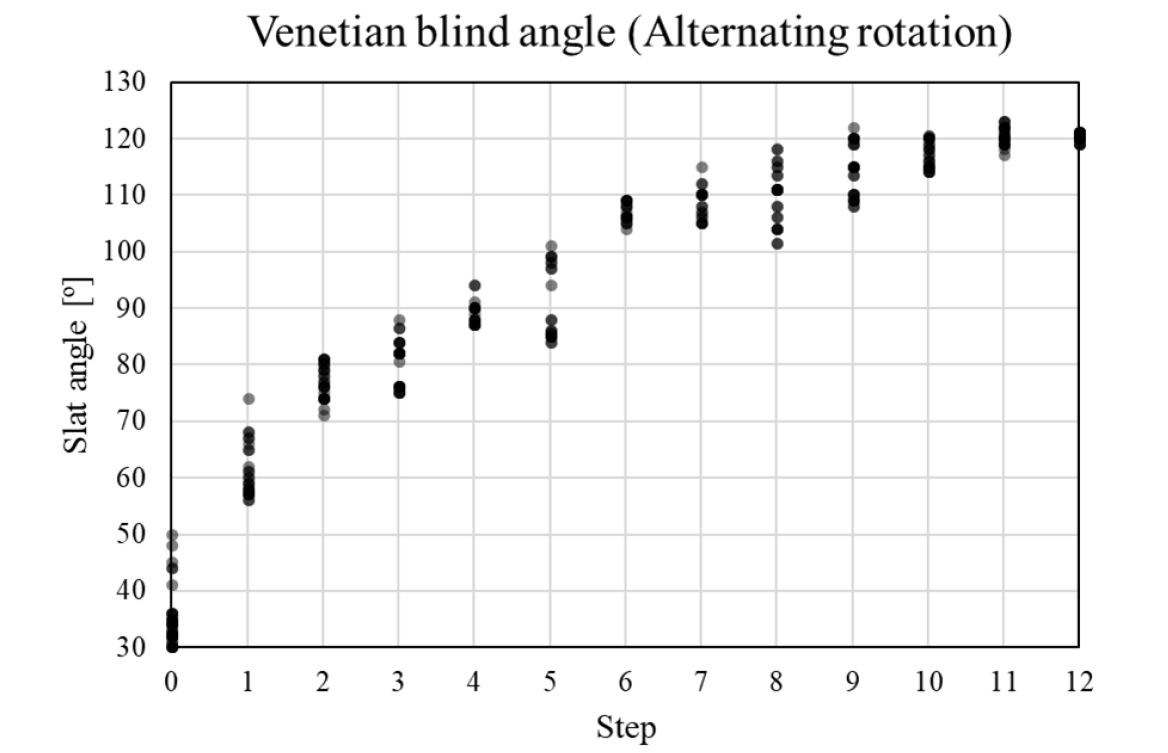
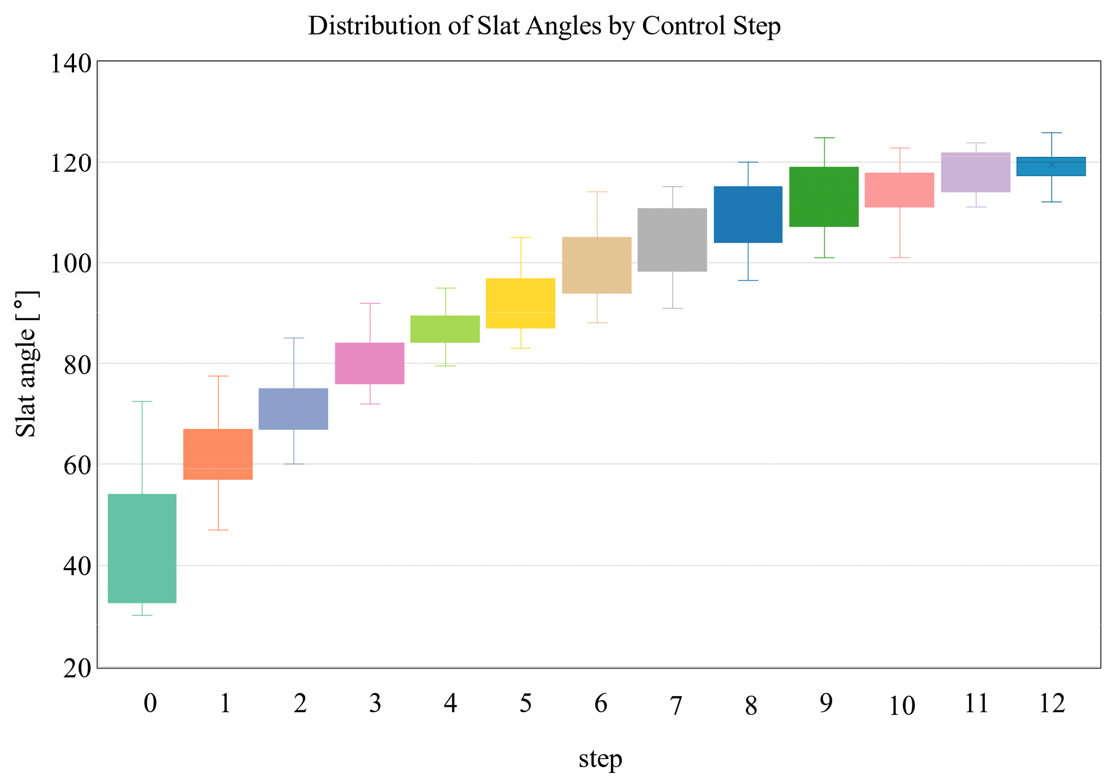
각 제어 스텝별 슬랫 각도의 평균값, 표준편차, 표준오차, 최소값, 최대값, 사분위수를 포함한 통계적 결과를 정리한 표는 다음과 같다(Table 3). 슬랫 각도의 표준편차는 초기 스텝 구간인 0 step에서 11.4°로 크게 나타났다. 반면 12 step에서는 표준편차가 3.7°로 감소한 것을 확인하였다. 최소값과 최대값 범위는 전체적으로 초기 스텝 구간인 0 step에서 2 step까지를 제외하고 ±20° 내외로 분포하였으며, Q1, Q2, Q3 값이 평균값과 분포하여 제어 값이 해당 범위에 집중되어 있음을 나타낸다.
Table 3
Slat angles and statistical values by venetian blind control step
4. 결 론
본 연구에서는 전동 베네시안 블라인드를 대상으로 제어 입력값에 따른 슬랫 각도의 정확도를 반복 측정을 통해 정량적으로 분석하였다. 동일한 제어 스텝 입력시 정회전과 역회전 조건에서의 슬랫 각도 차이를 확인하였고, 제어 방법에 따라 스텝에 따른 각도 변화를 확인하였다.
정회전과 역회전 조건에서 모두 제어 스텝 증가에 따라 슬랫 각도는 비선형적으로 증가하는 경향을 보였으며, 전 구간에서 평균 슬랫 각도는 정회전은 0 step에서 45.1°에서 12 step에서 121.2°까지 역회전은 0 step에서 42.6°에서 12 step에서 118.4° 사이로 나타났다. 교차 제어 조건에서는 0 step에서 평균 43.7°, 12 step에서 119.5°까지 증가하는 경향을 확인하였다. 이는 제어 방향 전환 및 반복 동작에 의한 슬립 현상 등이 영향을 미쳤을 것으로 판단된다. 전체 데이터를 종합하여 분석한 결과 슬랫 각도는 제어 스텝 증가에 따라 전체적으로 비선형적으로 증가하는 경향을 보였다. 또한 초기 스텝 구간인 0 step에서 표준편차는 11.4°로 크게 나타났고, 스텝이 증가할수록 표준편차는 12 step에서 3.7°로 낮아지는 경향을 보였다. 이러한 결과는 베네시안 블라인드 제품에서도 일정 수준 이상의 제어 일관성을 확보할 수 있음을 보여준다. 그러나 정회전과 역회전, 교차 제어 조건에서 동일한 제어 스텝 입력 시 슬랫 각도에 차이가 발생하는 것을 다수 스텝 구간에서 확인할 수 있었으며, 이는 모터의 작동 메커니즘 내에서 발생하는 기계적인 현상에 기인한 것으로 판단된다. 이와 같은 편차는 반복 제어 시 누적 오차로 이어질 가능성이 있으며, 슬랫 각도 기반 제어 알고리즘을 적용할 시 사전 보정 또는 방향 조건별 기준 설정이 필요함을 시사한다.
본 연구에서는 제어 입력값에 따른 슬랫 각도 실측을 통해 정회전과 역회전 조건에서 슬랫 각도의 재현성을 확인하였다. 시뮬레이션을 기반으로 실제 건물을 분석, 예측, 그리고 제어하는 기술(Digital Twin, Model Predictive Control (MPC) 등)은 외부 기상 정보, 건물 형상정보, 그리고 시스템 정보 등 건물 내외의 상태를 실시간으로 묘사, 재현하는 것이 필요하다. 차양의 경우 시뮬레이션 공간에서는 정확한 차양의 위치 묘사가 가능하지만, 실제 건물에서는 가상공간에서 묘사된 위치와 차이가 발생할 수 있다.
본 연구 결과는 베네시안 블라인드의 선형 제어, 최적제어를 통한 차양의 도(°) 단위 제어의 에너지 저감 효과 등이 시뮬레이션 환경에서 입증되었다 하더라도, 실제 건물에 적용된 베네시안 블라인드는 차양 자체가 가지는 오차로 인해 정확한 재현성을 확보하는 것에 한계가 있음을 의미한다. 본 연구는 제한된 조건에서 차양 각도 제어 값의 재현성을 검토하는 것을 목적으로 하였으나, 특정 샘플을 대상으로 하였기에 모든 베네시안 블라인드로의 일반화에는 한계가 있다.
컴퓨터 시뮬레이션 기술의 발전과 연산 속도의 향상으로, 보다 정밀한 시뮬레이션을 통해 다양한 패시브 시스템 제어 기법의 에너지 효율성이 입증되고 있다. 시뮬레이션 환경에서 구축된 분석 및 예측 기반 제어를 실제 건물에 적용하기 위해서는, 차양장치 보급 시 Step과 각도(angle) 정보 제공과 제어 재현성에 대한 사전 검토가 필요할 것으로 판단된다.
