

1. 서 론
2. 문헌 고찰
2.1 제로에너지건물 성능 격차 현황
2.2 Physical AI 로보틱스 기술 동향
2.3 건물 점검 로보틱스 및 드론 기술
2.4 Physical AI 핵심 기술 분석
3. 연구 방법
3.1 반체계적 고찰 방법론 근거
3.2 포함·제외 기준 및 문헌 선정 과정
3.3 TRL 정성적 평가 기준
4. ZEB-PAR 통합 프레임워크 도출
5. 고찰 및 결론
5.1 프레임워크 기여와 차별점
5.2 TRL 비대칭 분석 및 단계적 도입 전략
5.3 국내 데이터 제약 하의 초기 학습 전략
5.4 한계 및 향후 연구 과제
1. 서 론
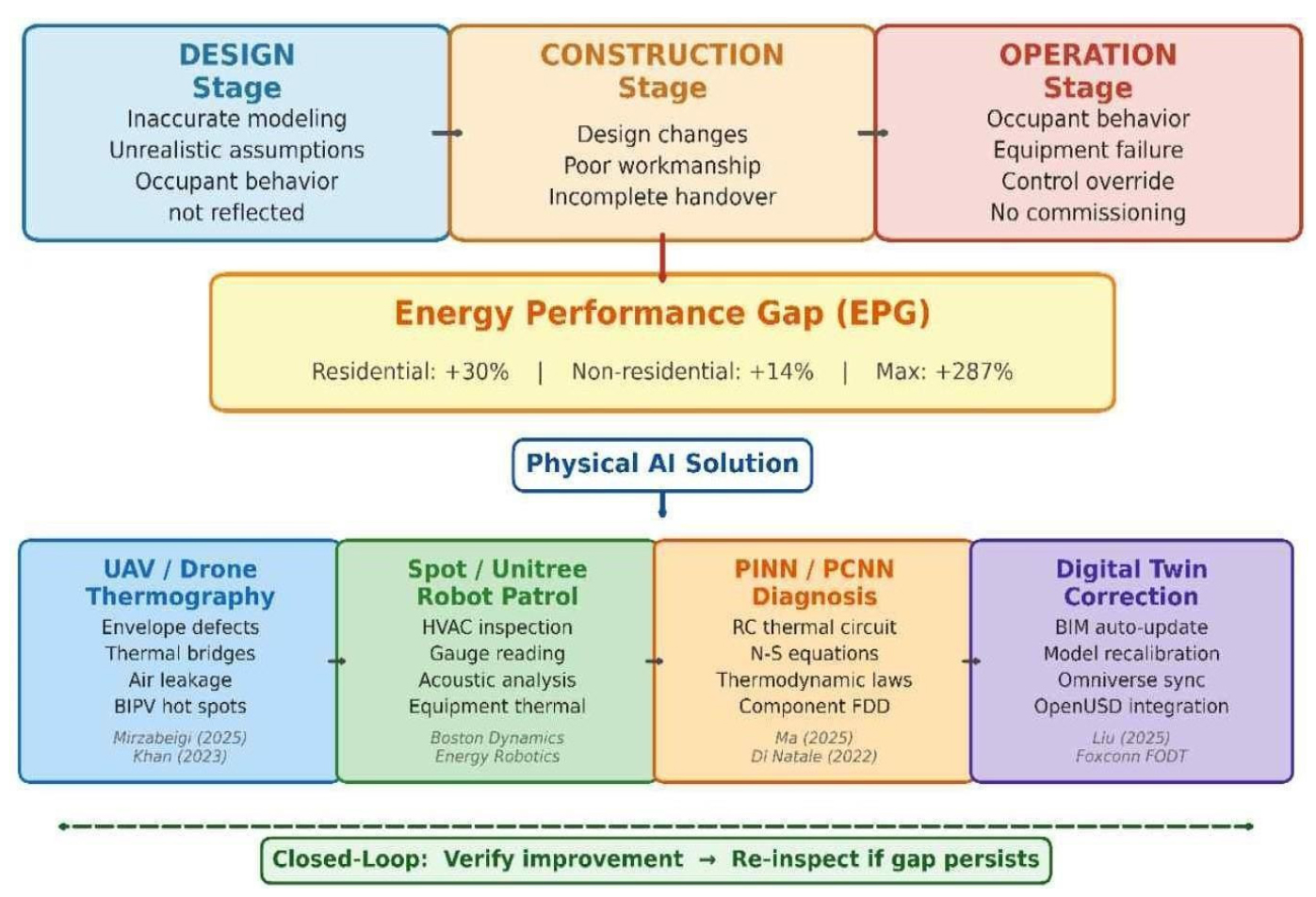
제로에너지건물(Zero Energy Building, 이하 ZEB)은 건물 부문 탄소중립 달성의 핵심 수단이다. 그러나 설계 단계에서 예측된 에너지 성능과 실제 운영 성능 사이에는 상당한 괴리, 즉 에너지 성능 격차(Energy Performance Gap, 이하 EPG)가 존재한다. Mahdavi and Berger (2019)1)의 메타분석에 따르면 주거용 건물의 EPG 중앙값은 +30%, 비주거용은 +14%에 달하며, Calì et al. (2016)2)은 최대 287%의 성능 격 차를 보고한 바 있다. CIBSE (2025)3)는 설계 에너지 모델이 준공 후 운영 도구로 진화하지 못하는 현행 프로세스의 구조적 한계를 지적하였다.
국내에서는 2025년부터 민간 건축물(연면적 1,000 m2 이상)로 ZEB 인증 의무화가 확대되었다. 2023 년 기준 누적 인증 1,909건(예비인증 1,391건, 본인증 518건) 중 5등급이 55.4% (1,057건), 4 ~ 5등급이 80% 이상을 차지하여 에너지자립률 20 ~ 40% 수준에 집중되어 있다. 이는 대부분의 인증 건물이 최저 등급 수준에 머물러 있음을 의미하며, 인증 건물의 실제 운영 에너지 데이터가 체계적으로 공개·분석되지 않아 설계 대비 실제 성능 격차의 규모와 원인이 국내에서는 충분히 규명되지 못한 상황이다.
이러한 성능 격차의 주요 원인은 크게 세 단계로 구분된다. 설계 단계에서는 부정확한 모델링과 비현실적 가정이, 시공 단계에서는 설계변경과 시공 품질 저하가, 운영 단계에서는 재실자 행태, 설비 고장, 자동 제어 수동 해제 등이 원인으로 지목된다4,5). Zou et al. (2018)4)은 6개 이해관계자 그룹에 걸쳐 33가지 EPG 원인을 식별하였으며, 운영 단계의 원인이 가장 지배적인 것으로 분석하였다. 이들 운영 단계 원인은 본질적으로 물리 세계의 문제이며, 이에 대한 해법 역시 물리 세계에서 행동하는 AI, 즉 Physical AI가 되어야 한다는 것이 본 고찰의 출발점이다.
Physical AI는 NVIDIA가 제시한 개념으로, 물리법칙 기반 시뮬레이션(PhysicsNeMo), 디지털 트윈(Omniverse), 로보틱스(Isaac/GR00T)를 아우르는 통합 플랫폼이다. CES 2026에서는 38개 이상의 휴머노이드 로봇 기업이 참가하여 상용화 전환이 확인되었다.
본 고찰의 문제의식은 다음 세 가지 연구 공백의 교차점에 위치한다. 첫째, 물리정보 기계학습(Physics-Informed Machine Learning, PIML) 관련 리뷰 논문 중 Ma et al. (2025)6)와 Jiang et al. (2025)7)은 방법론 분류에 집중하였으나 로보틱스 통합 및 ZEB 성능 격차 대응을 다루지 않는다. 둘째, Liu et al. (2025)8)의 NZEB 디지털 트윈 O&M 모델은 고정 IoT 센서에 의존하여 자율 로보틱스를 포함하지 않으며, 이로 인해 고정 센서로 포착할 수 없는 외피 결함, 설비 물리적 이상, 비정형 공간 환경 데이터의 공백이 해소되지 않는다. 셋째, Hu and Assaad (2024)9)는 BIM-로봇 기반 실내 환경 모니터링을 연구하였으나 수집 데이터가 에너지 성능 격차 진단이나 HVAC 제어 최적화와 연계되지 않는다. 이 세 공백이 교차하는 지점―즉 자율 로보틱스로 수집한 물리 데이터가 물리정보 AI 진단을 거쳐 ZEB 에너지 성능 격차 해소에 이르는 통합 폐루프―에 대한 연구는 현재까지 확인되지 않는다.
본 고찰은 이러한 연구 공백을 체계적으로 분석하기 위해 ZEB 성능 격차, Physical AI 로보틱스, 물리정보 AI의 세 영역에 걸친 문헌 고찰을 수행하고, CES 2026으로 대표되는 최신 로보틱스 기술 동향을 건물 적용 맥락에서 분석한 뒤, 고찰 결과를 종합하여 감지 → 진단 → 갱신 → 최적화 → 검증의 5단계 폐루프 통합 프레임워크 ZEB-PAR (Zero Energy Building–Physical AI Robotics)를 도출한다.
2. 문헌 고찰
2.1 제로에너지건물 성능 격차 현황
ZEB의 에너지 성능 격차는 국제적으로 광범위하게 보고되어 있다. 성능 격차의 원인 구조를 분석하면 운영 단계가 가장 지배적이다. Liang et al. (2019)5)은 재실자의 예상 초과 에너지 사용, 설계 대비 과다 재실자, 에너지 효율 기술의 고장을 상위 3대 원인으로 제시하였다. 한편, 전체 건물 수준에서 EPG가 ‘0’에 가까워 보이더라도 개별 설비 시스템 간의 과소비와 과소 사용이 상쇄되는 구조적 은폐가 발생할 수 있다. 현행 ZEB 인증은 건물 전체의 1차 에너지 소비량을 기준으로 평가하므로 이러한 상쇄 효과를 포착하지 못하며, 이는 개별 구성요소 단위의 물리적 점검과 진단이 필요함을 시사한다.
Zou et al. (2018)4)의 33가지 EPG 원인을 Physical AI 대응 가능성과 교차 분석하였다. 운영 단계의 주요 원인인 열교, 기밀 저하, COP 열화, 밸브 고착 등은 온도·음향·진동 등 물리량의 현장 측정을 통해서만 확인할 수 있는 현상이다. 고정 IoT 센서는 설치 위치가 한정되어 이러한 이상을 포괄적으로 포착하기 어렵다. 따라서 건물 내외부를 자율 이동하며 열화상·음향·LiDAR 등 다중 센서 데이터를 수집 하는 로봇과 드론이 보완적 수단이 된다. Fig. 1은 이러한 분석을 도식화한 것으로, EPG가 설계·시공·운영의 전 단계에 걸쳐 발생하는 구조를 상단에, 각 원인에 대응하는 Physical AI 기술(드론 열화상, 로봇 순회, PINN 진단, 디지털 트윈 보정)을 하단에 매핑하여 제시하고 있다.
Zou et al. (2018)4)이 식별한 33가지 EPG 원인을 설계·시공·운영 단계별로 재분류하고 Physical AI 기술의 대응 준비도를 TRL 기준으로 평가한 결과, 운영(외피) 열교 탐지(TRL 8)가 가장 높고 운영(제어) 커미셔닝 대응(TRL 4)이 가장 낮아 단계별 성숙도 편차가 크다.
2.2 Physical AI 로보틱스 기술 동향
CES 2026은 Physical AI 로보틱스가 연구·프로토타입 단계에서 상용 배치 단계로 전환된 분기점으로 평가된다. 휴머노이드 로봇 카테고리에 38개 이상의 기업이 참가하였으며, NVIDIA는 키노트에서 공장을 거대한 로봇 시스템으로 간주하는 접근을 제시하여, 동일 논리가 건물 운영관리에도 적용될 수 있음을 시사하였다10).
CES 2026의 주요 Physical AI 로보틱스 플랫폼을 건물 적용 가능성 관점에서 체계적으로 분석하기 위해, 각 플랫폼의 로봇 유형, 핵심 사양, 건물 적용 가능성, 출처를 Table 1에 정리하였다. 분석 목적은 CES 2026 시점에서 기술 성숙도별로 (a) 즉시 적용 가능한 플랫폼, (b) 중장기 적용 가능 플랫폼, (c) 추가 연구가 필요한 플랫폼을 식별하고, 이를 3장 연구방법 및 4장 ZEB-PAR 프레임워크 도출의 기술적 근거로 활용하는 것이다.
Table 1
Analysis of building applicability of major Physical AI robotics platforms at CES 2026
| Platform | Robot type | Key specifications | Building applicability | Source |
|
Boston Dynamics Spot 5.1 | Quadruped |
14 kg payload, thermal·acoustic·LiDA R, AI image analysis |
Immediate: autonomous facility inspection, DT update | Boston Dynamics (2026)11) |
| Boston Dynamics Atlas | Humanoid (electric) |
56 DOF, 50 kg payload, 360° joints |
Mid-term: complex inspection/repair (2028~) | NVIDIA CES (2026)10) |
| Tesla Optimus Gen 3 | Humanoid (electric) |
22 DOF hands, FSD-v15 neural net |
Mid-term: 2027 external sales target | Electrek (2026)12) |
| Unitree H1/H2 | Humanoid |
360° perception, 15 kg payload, G1: $16,000~ |
Industrial inspection: 360° perception + payload | NVIDIA CES (2026)10) |
| AgiBot X2/A2/G2 | Multi-purpose Humanoid |
Multi-env operation, 5,100 units shipped |
Multi-environment building use (research needed) | NVIDIA CES (2026)10) |
| DroneDeploy | Drone + AI platform |
VLM-based 3 AI models, OSHA 95% accuracy |
Construction safety, envelope inspection | NVIDIA CES (2026)10) |
Table 1의 분석 결과, 건물 분야에 즉시 적용 가능한 플랫폼은 Boston Dynamics Spot과 DroneDeploy 기반 드론이다. Spot은 이미 수백 개 산업 시설에서 자율 점검을 수행하고 있으며11), DroneDeploy는 300만 개 이상의 사이트에서 운용되고 있다10). 반면 휴머노이드 로봇(Atlas, Optimus, Unitree H1/H2)은 현재 자동차 공장 등 제조 환경에 집중되어 있어 중장기 적용이 현실적이다. 특히 Tesla Optimus Gen 3의 경우, Musk 본인이 2026년 1월 실적 발표에서 아직 R&D 단계임을 인정하였다12). 중국 로봇 기업의 양적 성장도 주목할 필요가 있는데, AgiBot 5,100대·Unitree 5,000대 이상의 출하 실적은 양산 체제 진입을 의미하며, 이는 중장기 건물 적용 가능성의 기반이 된다.
2.3 건물 점검 로보틱스 및 드론 기술
건물 외피 점검에서 드론과 열화상 촬영을 결합한 비파괴 점검 기술이 활발히 연구되고 있다. Mirzabeigi et al. (2025)13,14)은 시각 + 열화상 이중 센서 드론을 활용하여 외피의 열교, 재료 열화, 관통 결함을 자동 감지하는 통합 비전 기반 기법과, 비행-등반 이중 모드를 결합하여 숨겨진 수분 침투까지 탐지하는 접근을 제시하였다. Khan et al. (2023)15)은 드론 기반 외피 열저항 측정에 AI 예측 모델을 적용하여 R2 0.97의 정확도를 달성하였다. 이러한 드론 기반 외피 점검은 기존 수작업 점검 대비 시간·비용을 절감하면서 데이터의 공간적 해상도와 재현성을 높일 수 있어, ZEB 운영 단계의 외피 성능 격차 탐지에 핵심적 도구가 된다.
실내 환경 모니터링 분야에서 Hu and Assaad (2024)9)는 BIM, IoT, 자율 로봇 기반 이동 센싱, 초광대역(Ultra-Wideband, UWB) 실내 측위를 통합하는 디지털 트윈 프레임워크를 제안하여, 센티미터 수준의 정밀도로 실내 공기질의 공간 분포를 포착하였다. 이는 ZEB의 실내 환경 품질 모니터링에 직접 적용 가능한 방법론이나, 수집된 데이터를 HVAC 제어 최적화나 에너지 성능 격차 진단에 연계하는 부분은 다루지 않아 후속 연구가 필요하다.
2.4 Physical AI 핵심 기술 분석
Zhang and Yoon (2025)16)은 LLM 기반 에이전틱 디지털 트윈을, Liu et al. (2025)8)은 NZEB 디지털 트윈 O&M 프로세스를 제시하였지만 IoT 센서에만 의존하여 자율 로보틱스를 포함하지 않으며, 이 한계가 ZEB-PAR에서 능동적 디지털 트윈 보정이 필요한 연구 공백이다.
산업 시설에서는 Foxconn17) (PhysicsNeMo 기반 CFD 150배 가속)과 Wistron18) (에너지 효율 10% 향상, 연간 121,600 kWh 절감)이 성과를 보고하였고, Siemens-NVIDIA19)는 2026년 Erlangen 공장을 최초 AI 기반 적응형 제조 시설로 가동할 계획으로 자율 디지털 트윈을 목표로 하고 있다. 그러나 건물은 재실자 행태의 불확실성과 공간 복잡성으로 인해 맞춤형 적응이 필요하며, 이것이 ZEB-PAR 진단-갱신 단계의 역할이다.
PINN 및 물리정보 기계학습(PIML) 관련 핵심 문헌 7편(참고문헌 6, 7, 20, 21, 22, 23, 24)을 분석한 결과, 세 가지 건물 물리 영역에서 PINN의 적용 가능성이 확인되었다: (1) 건물 열역학 모델링 — RC 열회로 기반 PINN으로 냉난방 부하 예측20,21,22), (2) HVAC 설비 성능 모델링 — 열역학 보존 법칙을 손실 함수에 내재화한 물리제약 ML23), (3) 실내 기류장 및 에너지 디스패칭 — Navier-Stokes 방정식 또는 물리 일관성 제약을 손실 함수에 반영한 접근24). 이 중 실제 건물 운영 데이터로 검증된 연구는 Gokhale et al. (2022)20)와 Chen et al. (2023)22)에 한정되며, 나머지는 시뮬레이션 또는 실험실 환경 검증에 머물러 있다는 한계가 확인되었다. Ma et al. (2025)6)와 Jiang et al. (2025)7)의 두 리뷰 논문은 본 분류 체계의 방법론적 근거를 제공한다.
Table 2는 ZEB 성능 격차의 발생 단계별 주요 원인, Physical AI 대응 기술, 핵심 기술, 기존 연구 한계를 5개 단계에 걸쳐 매핑한 것이다. Table 2에서 확인되듯이, 설계 단계에는 LLM 기반 건물 에너지 모델(Building Energy Model, BEM) 자동 생성과 PINN 모델 보정이, 시공 단계에는 드론 열화상과 scan-to-BIM이, 운영 단계에는 Spot 자율 순회와 PINN+모델 예측 제어(Model Predictive Control, MPC)가 각각 대응된다. 그러나 모든 단계에 공통적으로 ZEB 특화 연구와 통합 프레임워크가 부재하며, 이러한 연구 공백이 4장에서 ZEB-PAR 프레임워크를 도출하는 근거가 된다.
Table 2
Classification of ZEB performance gap causes and Physical AI robotics technology mappin
| EPG stage | Major causes | Physical AI response | Key technology | Existing research gap |
| Design stage |
Inaccurate modeling, unrealistic assumptions |
LLM-based BEM generation, PINN calibration | EPlus-LLM, ModNN25) |
Insufficient real building validation |
| Construction stage |
Design changes, poor workmanship |
Drone thermography, scan-to-BIM |
UAV (Unmanned Aerial Vehicle) + DL, BIM2RDT |
No ZEB-specific research |
| Operation (envelope) |
Thermal bridges, air leakage, insulation loss |
Periodic drone thermal scan | Mirzabeigi et al. (2025)13,14) | No direct EPG linkage |
| Operation (HVAC) |
COP degradation, valve sticking |
Spot/Unitree autonomous patrol | Spot Orbit AI |
Not linked to energy optimization |
| Operation (control) |
Auto-control override, no commissioning |
PINN + MPC, LLM feedback | Liang et al. (2025)23), Xiao and You (2024)24) |
Robot data integration unverified |
Table 2에서 확인된 공통 연구 공백은 다음과 같이 종합된다. 설계·시공·운영의 모든 단계에서 개별 Physical AI 기술(드론 열화상, Spot 순회, PINN 진단, LLM 자동화)은 이미 상당한 기술 성숙도에 도달하였으나, 이들을 ZEB 성능 격차 해소라는 단일 목표 하에 통합하는 폐루프 프레임워크는 부재하다. 특히 (1) 로봇 수집 실측 데이터와 PINN 모델 간 전처리 파이프라인 부재, (2) 진단 결과의 디지털 트윈 자동 반영 구조 부재, (3) 제어 최적화 효과의 로봇 재검증 구조 부재의 세 가지 구조적 공백이 확인된다. 이러한 공백이 본 고찰이 3장 연구방법에서 반체계적 통합 접근을 채택하고 4장에서 ZEB-PAR 프레임워크를 도출하는 논리적 근거가 된다.
3. 연구 방법
3.1 반체계적 고찰 방법론 근거
본 고찰은 Snyder (2019)26)가 제시한 반체계적 문헌 고찰(semi-systematic review) 방법론에 기반하여 수행되었다. 반체계적 고찰은 체계적 리뷰의 엄밀성과 서술적 리뷰의 유연성을 결합한 접근으로, 다학제적 주제에서 연구 동향을 포괄적으로 분석하고 새로운 이론적 프레임워크를 도출하는 데 적합하다. Physical AI 로보틱스와 ZEB 성능 격차의 교차 영역은 로보틱스, 건물에너지, 물리정보 AI, 디지털 트윈 등 다수의 학문 분야가 교차하며, 이 분야를 통합적으로 다룬 선행 연구가 부재하여 PRISMA 기반 체계적 리뷰를 적용하기에는 문헌 모집단이 충분하지 않다. 따라서 반체계적 접근이 본 연구 주제에 가장 적합한 방법론으로 판단되었다.
3.2 포함·제외 기준 및 문헌 선정 과정
포함 기준은 2022 ~ 2025년 발간된 영어 또는 한국어의 학술논문 또는 공인 기술 보고서로서, ZEB 또는 NZEB의 에너지 성능과 Physical AI 기술(로보틱스, PINN, 디지털 트윈) 중 하나 이상을 다룬 연구이다. 제외 기준은 ZEB이 아닌 일반 건물만을 대상으로 한 연구, 로보틱스·AI·디지털 트윈과 무관한 순수 에너지 시뮬레이션 연구, 연구 방법이 불명확한 문헌이다.
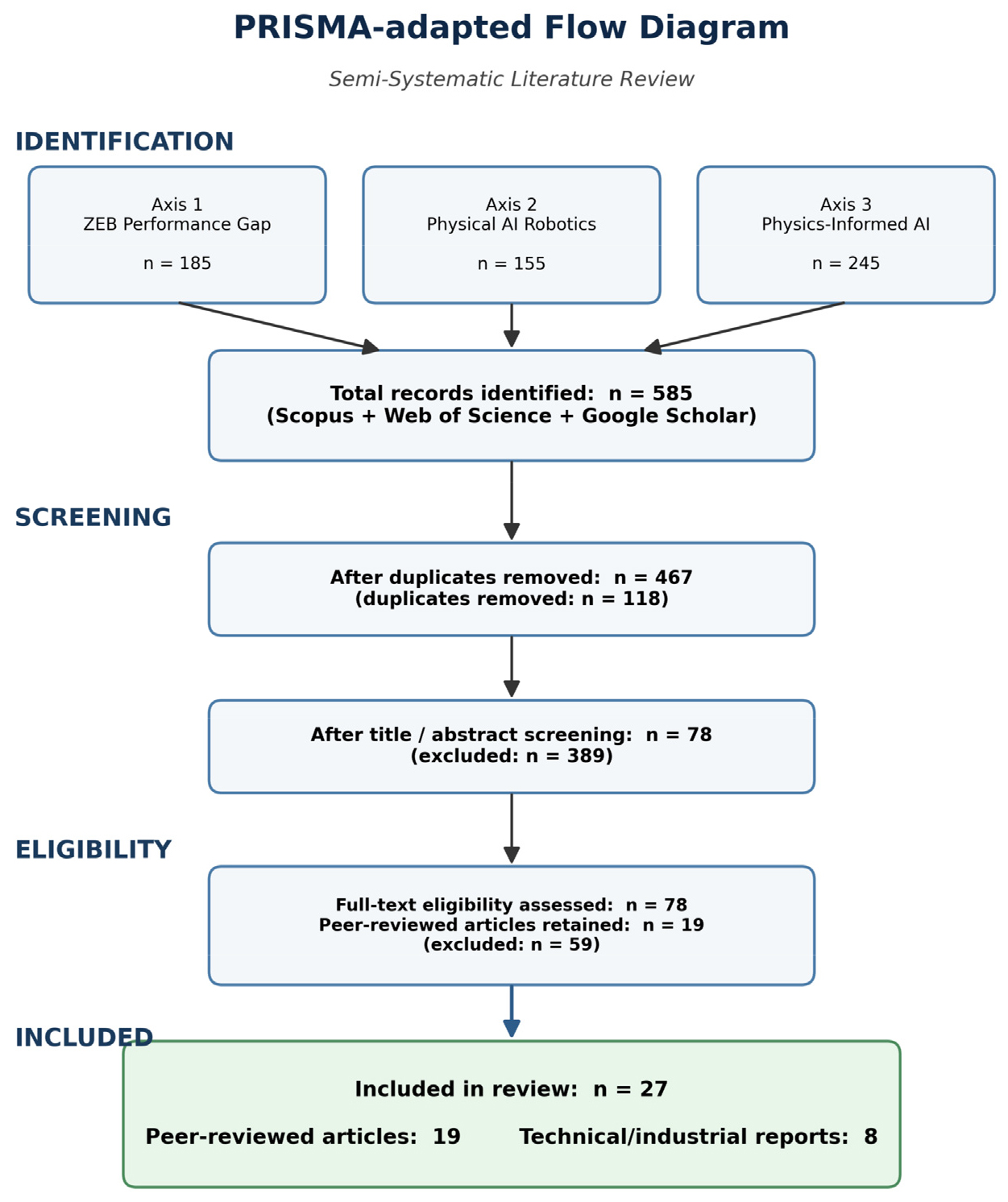
3개 검색 축의 교차 검색을 통해 수집된 문헌에서 중복 제거, 제목·초록 기반 1차 스크리닝, 본문 검토 기반 2차 스크리닝을 순차 수행하여 학술 피어리뷰 문헌 19편을 선정하고, 기술·산업 보고서 8편을 추가하여 최종 27편의 분석 대상을 구성하였다. 문헌 선정의 투명성 확보를 위해 PRISMA 를 준용한 흐름도를 Fig. 2에 제시하였다.
최종 선정된 27편에 대해 Physical AI 기술 유형, ZEB 성능 격차 원인과의 관련성, 폐루프 구성 가능성(감지 → 진단 → 조치 → 검증 연결 여부), 기술성숙도 판단 근거(실험 환경, 실증 규모, 상용화 수준), NVIDIA Physical AI 에코시스템과의 정합성의 5개 기준으로 정보를 추출하였다. 본 고찰에서는 검색 쿼리 최적화 및 문헌 분류 보조를 위해 AI 코딩 에이전트 Claude Code (Anthropic, 2025)27)를 활용하였으며, AI가 생성한 모든 참고문헌에 대해 원문 대조 검증을 수행하였다. 또한, 기술·산업 보고서 8편은 피어리뷰 문헌이 아닌 기업 발표 자료로서, 기술 사양과 출하량 등의 수치는 독립적 검증이 제한된다. 본 고찰에서는 산업 기술 동향의 방향성을 파악하기 위한 보조 자료로 활용하였으며, 프레임워크 도출의 핵심 근거는 학술 피어리뷰 문헌 19편에 기반한다.
3.3 TRL 정성적 평가 기준
본 고찰에서는 NASA/DoD가 정의한 9단계 기술 성숙도(Technology Readiness Level, TRL) 체계를 원용하였다. TRL 1 ~ 3은 기본 원리 관찰·개념 정립·실험실 개념 증명, TRL 4 ~ 6은 실험실·유관 환경·관련 환경에서의 기술 검증, TRL 7 ~ 9는 운영 환경에서의 시스템 프로토타입·시스템 완성·실제 운영 검증 단계에 해당한다.
본 고찰의 TRL 판정은 저자의 정성적 판단에 기반하며, 판정 근거는 다음 3개 지표의 조합으로 결정되었다. (a) 학술 문헌 보고 수준—시뮬레이션(Simulation), 실험실(Laboratory), 파일럿(Pilot), 실증(Empirical)의 4단계 분류, (b) 산업 적용 실적—프로토타입(Prototype), 제한 배치(Limited deployment), 상용 운용(Commercial operation)의 3단계 분류, (c) 건물 분야 특화 연구 유무—건물 도메인에서 검증된 연구의 존재 여부.
3개 지표가 모두 높은 수준일 때 TRL 7 이상, (a)·(c)만 충족할 때 TRL 5 ~ 6, (a)만 시뮬레이션 수준으로 충족할 때 TRL 4 이하로 판정하였다. 각 기술의 TRL 판정 근거가 되는 평가 근거 문헌 유형(Evidence Type)은 4장 Table 3의 신설 열에 명시하였다. 평가 근거 문헌 유형(Evidence Type) 열은 각 기술의 검증 단계가 시뮬레이션(Simulation) 수준에 머물러 있는지, 실험실(Laboratory)·파일럿(Pilot)을 거쳤는지, 또는 실제 건물·산업 시설에서의 실증(Empirical)에 도달하였는지를 구분하여, TRL 판정 근거의 성격을 독자가 직접 확인할 수 있도록 하였다. 본 정성적 평가의 한계는 저자 1인 판정에 의존한다는 점이며, 전문가 델파이 또는 AHP 기반 정량 평가는 후속 연구 과제로 제안된다.
Table 3
TRL evaluation and building application bottleneck analysis of Physical AI technologies per ZEB-PAR stage
|
ZEB-PAR stage | Key technology | TRL | Evidence Type | Industry adoption |
Building bottleneck | Mitigation strategy |
| Perceive |
Drone thermography | 8 |
Empirical (Mirzabeigi, 202513,14); DroneDeploy 3M + sites) |
Commercial operation |
Weather/lighting constraints |
Optimal shooting condition protocol |
| Perceive | Spot inspection | 7 |
Empirical (Boston Dynamics 202611): hundreds of facilities) |
Commercial operation |
Building-specific navigation |
BIM-linked path planning |
| Diagnose |
PINN thermodynamics | 6 |
Pilot + Academic (Gokhale et al., 202220), Chen et al., 202322): partial real-building validation) |
Academic research stage |
Insufficient real building data |
Robot data learning pipeline |
| Diagnose |
N-S PINN airflow | 4 |
Simulation (Xiao and You, 202424): CFD validation only) | Lab level |
Computational cost, 3D complexity |
PhysicsNeMo GPU acceleration |
| Update | Scan-to-BIM | 7 |
Empirical (Hu and Assaad, 20249); construction site deployment) |
Partial construction use |
Building scan constraints during operation |
Robot 360° scan automation |
| Optimize | Physics-MPC | 6 |
Pilot (Xiao and You, 202424): grid-interactive community pilot) |
Academic + pilot |
Model calibration cycle uncertain |
DT real-time calibration linkage |
| Optimize | LLMAgent | 4 |
Prototype (Liang et al., 202523): prototype stage) | Prototype |
Insufficient building domain knowledge |
Building energy fine-tuning |
| Verify |
Robot re-inspection | 7-8 |
Empirical (Boston Dynamics, 202611): hundreds of facility operations) |
Industrial operation |
Inspection cycle optimization undefined |
EPG convergence- based adaptive cycle |
4. ZEB-PAR 통합 프레임워크 도출
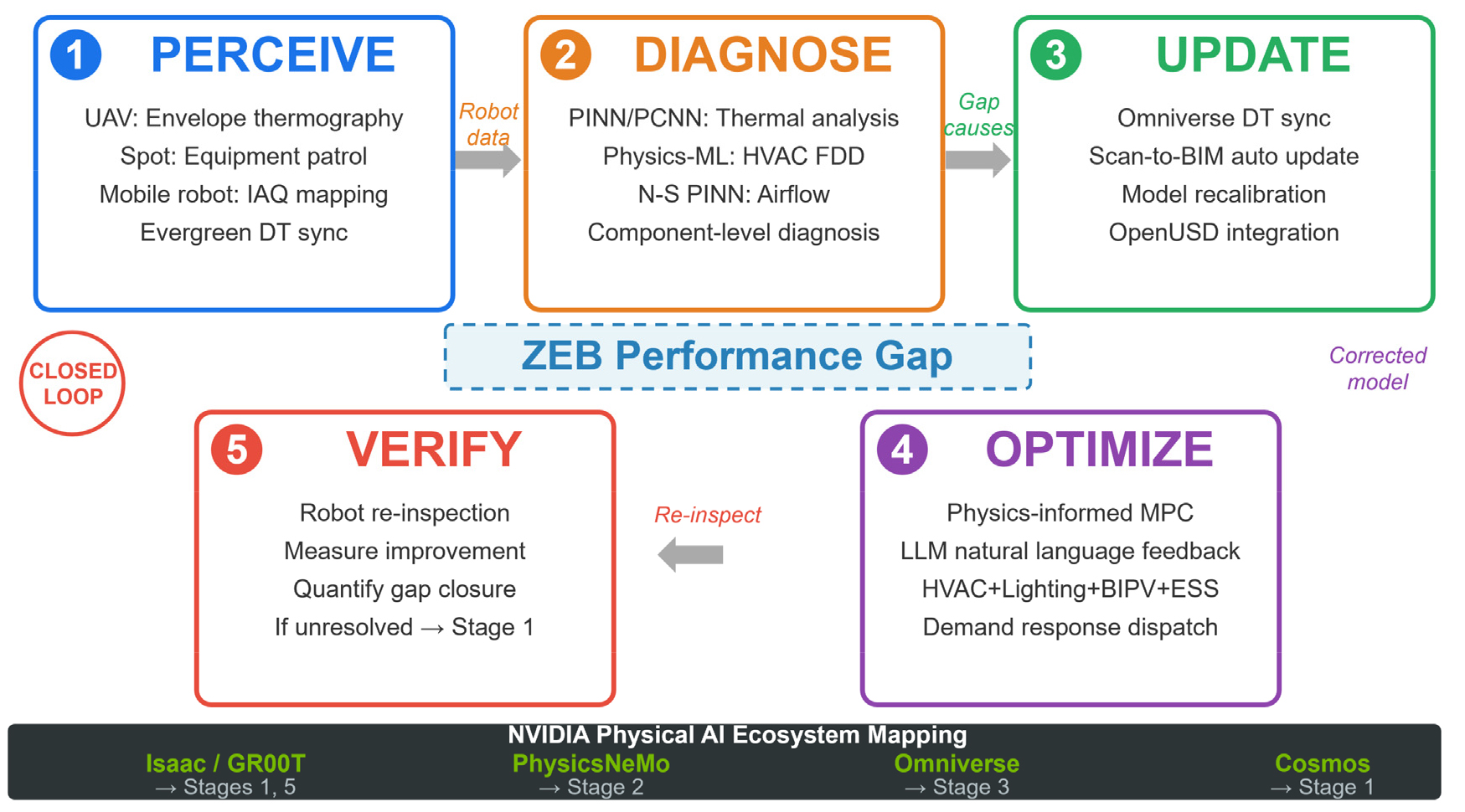
문헌 분석 결과를 종합하여 Physical AI 로보틱스 기반 폐루프 프레임워크 ZEB-PAR를 Fig. 3과 같이 도출하였다. ZEB-PAR는 Perceive (감지) → Diagnose (진단) → Update (갱신) → Optimize (최적화) → Verify (검증)의 5단계로 구성되며, NVIDIA 에코시스템(Isaac, PhysicsNeMo, Omniverse, Cosmos)과 대응된다. Verify에서 성능 격차 미해소 시 Perceive로 복귀하여 폐루프가 완성된다. NVIDIA의 Perceive-Reason-Plan-Act 4단계에서, Reason은 본 프레임워크에서 물리법칙 기반 진단(Diagnose)과 디지털 트윈 보정(Update)의 두 기능으로 분화되었다. 이는 건물 에너지 성능 관리에서 ‘원인 진단’과 ‘모델 갱신’이 서로 다른 기술 스택(PINN vs. Omniverse)과 데이터 흐름을 요구하기 때문이다. 또한 Act는 모델 기반 최적 제어(Optimize)와 물리적 재검증(Verify)으로 분리되었는데, 이는 제어 조치의 효과를 로봇 재점검으로 물리적으로 확인하는 단계가 폐루프 완성에 필수적이기 때문이다.
ZEB-PAR의 5단계별 TRL을 분석한 결과, Perceive-Verify 단계(드론 열화상 TRL 8, Spot 점검 TRL 7) 는 즉시 구현 가능한 반면, Diagnose-Optimize 단계(Navier-Stokes PINN TRL 4, LLM 에이전트 TRL 4) 는 병목이 되어 단계적 도입이 현실적이다. Table 3는 ZEB-PAR의 8개 핵심 기술별 TRL과 병목을 정리한 것이다. 평균 TRL 6으로 시스템 프로토타입 수준이다.
(1) Perceive(감지): 고정 IoT 센서의 공간적 한계를 보완하기 위해 드론(외피 열화상), 4족 로봇(기계실·옥상 순회), BIM 연동 이동로봇(실내 환경 매핑)이 물리적 상태를 능동적으로 수집하며9), 수집 데이터는 미션 완료 시 디지털 트윈을 자동 갱신한다.
(2) Diagnose(진단): 수집 데이터를 물리법칙 내재 AI에 투입하여 성능 격차 원인을 분류한다. 건물 열역학(PINN/PCNN, RC 열회로), HVAC 설비(열역학 법칙, COP 편차), 실내 기류(Navier-Stokes PINN)의 세 영역에 적용되며, 로봇 수집 실측값과 설계값의 편차를 구성요소 수준에서 식별한다. NVIDIA PhysicsNeMo가 모델 개발·배포를 지원한다.
(3) Update(갱신): Omniverse 기반 디지털 트윈을 로봇 점검 결과로 보정한다. 기존 연구8)가 IoT 센서에 의존하는 것과 달리, 로봇의 scan-to-BIM 자동 비교와 PINN 역추정 파라미터로 에너지 모델을 재보정하며, OpenUSD로 데이터가 통합된다.
(4) Optimize(최적화): 보정된 디지털 트윈에 기반하여 HVAC·조명·건물 일체형 태양광(Building-Integrated Photovoltaic, BIPV)·ESS의 통합 최적 제어를 자동 실행한다. 물리정보 MPC24)가 에너지 절감과 열쾌적을 동시 달성하며, LLM 에이전트23)가 운영자의 자연어 피드백으로 MPC 파라미터를 조정한다.
(5) Verify(검증): 최적화 조치 이후 로봇이 재순회하여 개선 효과를 물리적으로 실측하는 단계이다. 외피 보수 후 드론이 동일 경로로 열화상을 재촬영하여 열교 해소 여부를 확인하고, HVAC 수리 후 로봇이 설비실을 재점검하여 COP 회복을 검증하며, 제어 최적화 후 이동로봇이 실내 환경을 재매핑하여 개선을 확인한다. 실측된 성능 개선이 목표에 미달할 경우 Perceive 단계로 복귀하여 추가 원인 탐색을 수행함으로써 폐루프가 완성된다. 이는 기존 커미셔닝의 일회성 한계를 보완하는 지속적 자율 커미셔닝 개념에 해당한다.
5. 고찰 및 결론
5.1 프레임워크 기여와 차별점
본 고찰은 Physical AI 로보틱스를 ZEB 운영관리의 중심 기술로 위치시키고, PINN과 로보틱스를 진단 단계에서 결합하며, NVIDIA 에코시스템과의 정합성을 분석한 점에서 기존 연구와 차별화된다. 또한, ZEB의 EPG (+14 ~ 30%)가 물리 세계 문제임을 확인하고, 2022 ~ 2025년 발간된 27편의 문헌 분석을 통해 5단계 폐루프 프레임워크 ZEB-PAR를 도출하였다. 드론 열화상(TRL 8), 4족 로봇 자율 점검(TRL 7), PINN 기반 건물 열역학 모델링(TRL 5 ~ 6), 디지털 트윈 통합(TRL 4 ~ 7) 등 개별 기술은 상당한 수준에 도달하였으나, 이들을 ZEB 성능 격차 해소라는 단일 목표 하에 통합한 연구는 확인되지 않았다. ZEB-PAR의 각 단계는 NVIDIA Physical AI 에코시스템(Isaac, PhysicsNeMo, Omniverse, Cosmos)과 기술적으로 정합되며, 기존 문헌의 개별 기술 성과가 프레임워크의 각 단계에 대응됨을 확인하였다.
5.2 TRL 비대칭 분석 및 단계적 도입 전략
TRL 분석 결과, Perceive-Verify 축(평균 TRL 7)과 Diagnose-Optimize 축(평균 TRL 5) 사이에 기술 성숙도의 비대칭이 존재한다. 이는 로봇에 의한 데이터 수집과 재점검은 현재 기술로 구현 가능하나, 물리정보 AI 진단과 LLM 기반 최적화는 건물 도메인 특화 연구가 선행되어야 함을 의미한다. 특히 로봇 수집 데이터와 PINN 모델 간 전처리 파이프라인 개발이 핵심 과제이다. 따라서 단기적으로 Perceive-Verify 루프를 우선 구축하고 중장기적으로 Diagnose-Optimize 단계를 순차 통합하는 단계적 접근이 현실적이다.
5.3 국내 데이터 제약 하의 초기 학습 전략
ZEB-PAR의 Diagnose 단계는 PINN과 LLM 기반 AI 모델의 학습을 전제로 하나, 국내 ZEB 인증 건물(2023년 기준 누적 1,909건)의 실제 운영 에너지 데이터가 체계적으로 공개되지 않은 현실에서 국내 맞춤형 학습 데이터 확보가 실무적 제약이 된다. 본 고찰은 이러한 데이터 갈증 환경에서 ZEB-PAR의 초기 학습 데이터를 확보하기 위한 세 가지 전략을 제시한다.
첫째, 물리 기반 합성 데이터 생성이다. NVIDIA PhysicsNeMo를 활용한 고속 시뮬레이션(Foxconn 사례에서 CFD 150배 가속 보고17))으로 다양한 운영 조건의 합성 데이터를 생성하여 PINN 사전 학습에 활용할 수 있다. 합성 데이터는 실측 데이터 확보 이전 단계의 Cold-start 문제를 완화한다.
둘째, 전이 학습이다. 해외 공개 ZEB 데이터셋 또는 상업 건물 에너지 공개 데이터로 사전 학습된 PINN 모델을 국내 ZEB의 기후·사용 패턴에 맞게 미세 조정하는 접근이 가능하다. 이는 Di Natale et al. (2022)21)의 물리적 일관성 보장 구조가 도메인 전이에 유리하다는 특성을 활용한다.
셋째, 능동적 데이터 수집이다. ZEB-PAR의 Perceive 단계가 고정 IoT 센서로 포착할 수 없는 구성요소 단위 물리량(외피 실측 열관류율, 설비 실측 COP)을 로봇·드론으로 능동 수집하므로, 프레임워크 배치 과정 자체가 학습 데이터셋 구축과 동시에 진행되는 선순환 구조가 형성된다. 이는 데이터 부족을 프레임워크 설계 단계에서 내재적으로 해소하는 ZEB-PAR의 차별적 장점이다.
이 세 전략의 조합이 국내 ZEB-PAR 파일럿 실증에서 우선 검증되어야 할 과제이며, 특히 PhysicsNeMo 기반 합성 데이터 사전 학습 → 해외 공개 ZEB 데이터셋 전이 학습 → 국내 로봇 수집 실측 데이터 미세 보정의 3단계 학습 파이프라인 설계가 후속 연구의 핵심 과제이다.
5.4 한계 및 향후 연구 과제
본 고찰의 한계로는 ZEB-PAR가 문헌 분석에 기반한 개념적 단계이며 실제 ZEB에서의 실증이 수행되지 않은 점, 중소규모 건물에서의 비용 효율성이 불확실한 점, 반체계적 리뷰의 포괄성이 제한적인 점이 있다. TRL 평가는 저자의 정성적 판단에 기반하며 향후 전문가 델파이 또는 AHP 기반 정량 평가가 필요하다. 향후 연구 과제로는 (1) 실제 ZEB에서 로봇 + 드론 기반 점검 데이터 수집 및 PINN 모델 보정 파일럿, (2) LLM 기반 자연어 인터페이스의 건물 운영자 사용성 평가, (3) NVIDIA PhysicsNeMo/Omniverse 기반 ZEB 디지털 트윈 프로토타입 개발이 우선적으로 제안된다.
