

기호설명
t : 시간
V : 풍속(m/s)
D : 부유체 실린더의 직경(m)
L : 부유체 실린더의 길이(m)
ρ : 밀도[kg/m3]
 : 상대속도(m/s)
: 상대속도(m/s)
 : 상대 가속도(m/s2)
: 상대 가속도(m/s2)
Uw : 유체 입자의 속도(m/s)
UB : 몸체의 속도(m/s)
Cd : 항력계수
Ca : 부가질량계수
Hs : 유의파고(m)
Tp : 스펙트럼 최대에 해당하는 주기(s)
1. 서 론
해상 부유식 풍력 발전기의 연구에 대한 관심이 여러 개의 부유체 모델과 함께 최근 몇 년 동안 증가하였다. 그중에서 스파 부이 모델이 전체 동적인 특성 개선과 이해를 목적으로 광범위하게 연구가 수행되었다. 기존의 연구는 NREL 5 MW의 풍력 발전기 모델을 대상으로 하여 부유식 스파부이 풍력 발전기에 대한 조합된 풍속과 파도의 환경에서 전체 시스템에 대한 동특성, 하중과 출력의 결과를 분석하였다.
해상 풍력 발전에서 유지/보수비용이 더 중요하게 부각되므로 향후에 부품수가 적고 고장 확률이 적은 집적 구동형 풍력 발전기의 사용이 현격히 증가 할 것으로 예상하고 있다1). 풍력 발전기의 구성 품 중에 하중을 많이 받는 부분은 날개 뿌리, 저속 동력 전달 장치, 요 베어링, 타워 하단 전후 굽힘 모멘트 이지만 이 중에서도 타워 하단 전후 굽힘 모멘트가 가장 많이 작용한다2).
본 연구에서는 제주 월정해역에 설치된 2 MW 영구자석 집적 구동형 풍력 발전기 모델을 대상으로 HAWC2를 이용하여 풍력발전기를 모델링하였고, 하부구조물은 스파 부이 부유체 모델을 적용하였다. 기존의 NREL 5 MW 풍력 발전기를 위해 적용되었던 부유체 스파 부이 모델의 길이와 발라스트를 수정하여 2 MW급 집적 구동형 풍력 발전기에 적합한 스파 부이 부유체를 모델화하였다. 본 연구는 2 MW급 직접 구동형 부유식 스파 부이(Spar-buoy)풍력 발전기의 종동요 운동(Platform pitch)에 의한 타워 하단 전후 굽힘 모멘트, 발전기 출력과 피로파괴 등가하중(DEL: Damage Equivalent Load)3)의 결과를 최대, 최소, 평균, 표준편차로 제시하였으며 2 MW 집적 구동형 육상풍력발전기의 결과와 비교하였다.
HAWC2 (Horizontal Axis Wind turbine Code 2nd generation)는 파도와 바람에 의한 풍력 발전기의 동적인 응답을 결정하기 위하여 각각의 모듈(Aero-hydro-servo-elastic)들이 전체 연동이 되어 상호작용을 함으로써 부유식 풍력발전기의 공수탄성 시뮬레이션을 수행한다. 또한 HAWC2 code는 공기역학에 대한 진보된 날개 요소 모멘텀(Advanced Blade Element) 이론과 구조역학에서 유한요소 형식에 기초를 두고 있고 풍력 발전기의 시스템의 설계 및 연구 목적으로 사용되고 있다4).
2. 부유식 풍력 발전기 정적 평형
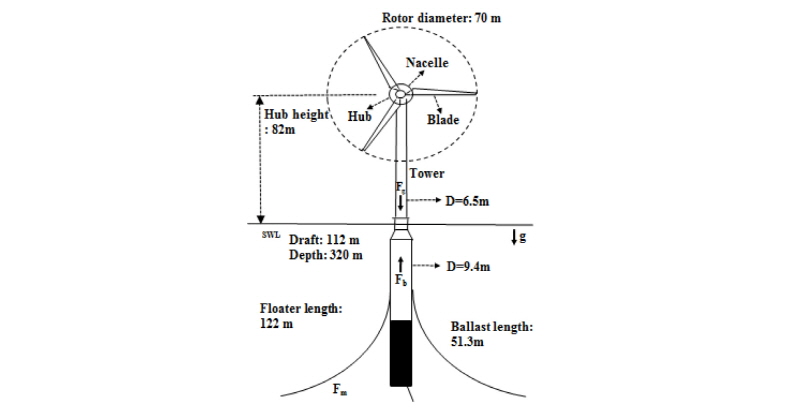
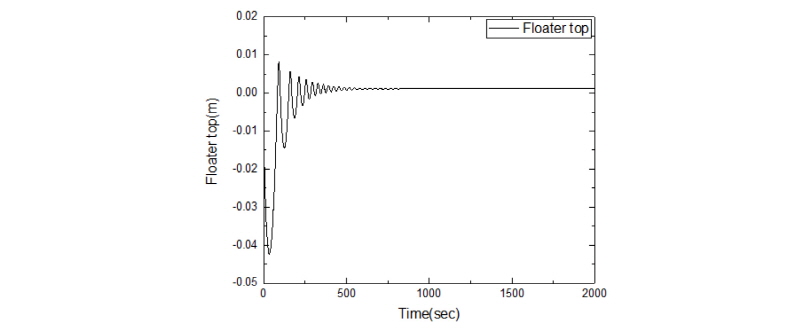
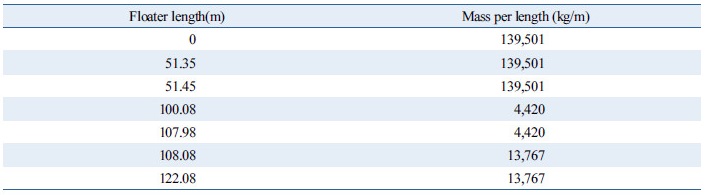
Fig. 1에 2 MW 부유식 스파 부이(Spar buoy) 직접 구동 형 풍력발전기의 개략적인 배치도를 제시하였다. Fig. 1에서 해수면(Mean sea level) 위의 영역은 2 MW급 영구자석 직접 구동형 풍력 발전기에 대한 타워와 허브 높이 로터 직경이고, 해수면 아래는 부유식 스파 부이 플랫폼의 잠긴 깊이(Draft), 직경과 밸러스트의 무게와 길이 대하여 나타내었다. 정적 평형(Static equilibrium) 상태를 위하여 바람조건은 풍속이 0 m/s, 파도조건은 파가 없는 잔잔한 물(Still water)에서 0 s-2000 s의 시간 동안 계산을 진행하였다. 정적평형상태 위하여 2 MW 영구자석 직접 구동형 풍력 발전기의 아래로 작용하는 힘의 무게(Fg), 풍력 발전기의 무게와 계류의 무게(Fm)를 지탱하여 위로 작용하는 부유체 스파 부이 플랫폼의 부력(Fb)을 고려하면서 부유체의 길이와 밸러스트의 무게를 조절하였고 물성치를 Table 1에 제시하였다. Fig. 2는 부유체 상부(Floater top)에서 시간에 따른 상하동요 운동(Heave)을 나타낸 것이다. 250초부터 상하동요 운동은 0.0035 m 이하로 감쇄한다. 500초 동안 12번의 상하동요 운동으로 0.024초의 주기를 갖는다.
|
Fig. 1 Schematic layout of floating spar-buoy wind turbine with 2 MW PMSG direct-drive generator at 320m of water depth4) |
3. 제어시스템
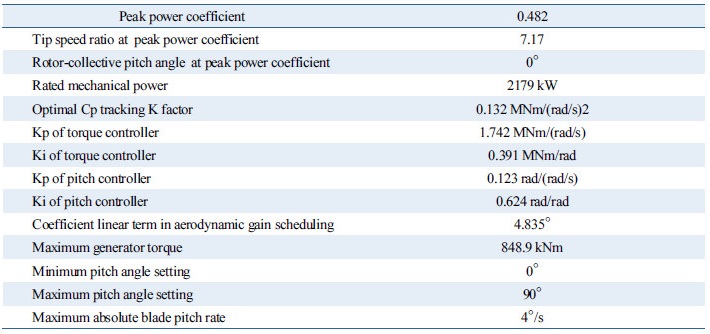
Table 2에 2 MW 집적 구동형 부유식 풍력 발전기의 모델에 대한 전체 시뮬레이션에서 제어기 부분의 입력 값을 제시하였다. 이 부유식 풍력 발전기에 대한 제어 시스템은 이전 연구에서 수행하였던 육상의 제어 시스템을 적용하였다. 설계의 근거로 2 MW급 직접 구동형 풍력 발전기 제원은 동적특성을 위해서 제주 월정리 해역에 설치된 풍력 발전기 모델의 정보를 근간으로 하였다. 이 풍력 발전기 모델의 구동 자료(Operational data)로부터 HAWC2 제어기 프로그램인 HS2PID를 사용하였다. HS2PID는 풍력 발전기의 PI 제어기에 대하여 parameter의 값을 조정하는 프로그램으로서 Table 2에 제시된 발전기 회전력 제어와 날개 피치 제어의 비례제어 게인(kP), 적분 게인(kI), Optimal Cp tracking factor 의 값을 조절할 수 있다5).
4. 바람하중
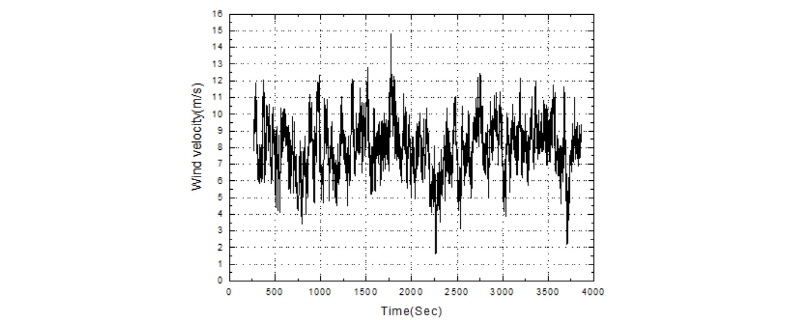
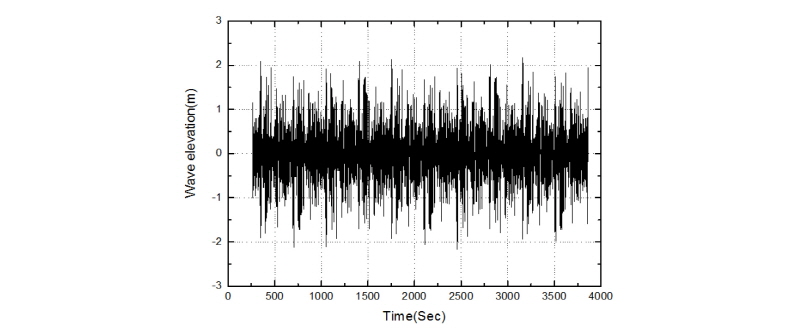
Fig. 3은 허브 높이에서 난류 풍속의 시계열 그래프를 나타낸 것이다. 풍속이 평균 풍속 8 m/s를 가지면서 요동(Fluctuation)하는 것을 보여준다. 평균 풍속은 몇 분 단위부터 몇 년까지 변할 수 있는 주어진 기간에 대한 즉각적인 값의 통계적인 평균값이다6). 본 연구에서는 23개의 평균속도(3-25 m/s)를 가지면서 난류 풍속을 구현하기 위하여 Risø 에서 만든 난수생성(seed number)번호를 사용 하였다. 그리하여 1001부터 1005까지 5개의 번호로 난류 데이터를 생성하였다. 이러한 5개의 1시간 난류 데이터가 풍황 하중으로 적용이 되었고 HAWC2로 계산되어진 결과 값이 최대, 최소, 평균, 표준편차로 통계화되었다. 난류 모델은 Mann turbulence 모델을 사용하였다7). Mann turbulence 모델은 테카르트 좌표계 안에서 공간벡터장을 생성한다. 그 공간 벡터 장은 3차원 u, v, w 속도벡터들의 변수들 사이에서 서로 상관관계를 가진다. 난류 장에서 가로 ,세로의 길이는 각각 150 m, 150 m로서 2 MW 집적 구동형 풍력 발전기의 로터, 타워가 난류 장 안에 포함되도록 하였다. 2 MW 직접 구동형 부유식 풍력 발전기의 난류강도(Iref)는 IEC 61400-1에서 정의되어진 0.14를 택하였다. 5개의 1시간 데이터의 난류 영향을 확인하기 위하여 Fig. 4와 같이 불규칙파는 동일한 것으로 계산에 적용이 되었고 바람의 방향과 파도의 방향은 일치하는 COD(Co-directional)로 설정하였다.
5. 파도하중
HAWC2 code에서 수력학적 하중은 모리슨 공식(Morison formular)을 기반으로 하고 있다. 모리슨 공식은 파장 보다 작고 가느다란 부유체 구조물에 실제적으로 적용이 된다. 실린더형의 풍력 발전기의 긴 부유체에 대한 단위길이당 수력학적인 힘은 식(1)의 모리슨 공식에 의해서 결정된다8-11).
 (1)
(1)
식(1)은 유연성(flexible) 있는 긴(Slender) 구조물(Structure)에 대하여 적용이 되어 D/L < 0.2의 조건으로 첫 번째 항으로서 프루드-크릴로프(Froude-Krylov) 힘은 구조물에 의하여 교란되지 않은 파에 의한 압력을 구조물 전체 표면에 대하여 적분함에 의하여 구해진다. 두 번째 항인 관성력은 잠긴 물이 움직임에 의해서 유발되어진 힘이다. 세 번째 항은 항력(Drag force)이다. 항력은 파도와 부유체 사이에서 상대적인 움직임 때문에 발생한다. AR은 부가질량 계수(Ca)과 관련하여 부유체 기준 단면 영역이다. 교환 식(2)의 상대속도는 유체의 속도에 물체의 속도를 뺀 값이다. 식(1)의 두 번째 항에서 감쇄력이 상대속도를 통해서 나타난다. 본 연구에서 부가 질량계수와 항력 계수는 덴마크 Risø 제시한 값으로 부가질량 계수: 0.969954, 항력계수: 0.6으로서 부유체의 단위길이당 동일 값으로 적용하여 계산하였다. 이 계수의 값들은 부유식 스파 부이가 극한 해역에서도 적용되는 값으로서 높은 진동의 Re 수의 실린더 형에 대하여 전형적인 계수이다12).
 (2)
(2)
Joint North Sea Wave Project (JONSWAP) 스펙트럼이 불규칙파를 계산하기 위해 사용되었다. JONSWAP 스펙트럼은 북해에서 파도 상황을 위한 전형적인 에너지 스펙트럼이다.
6. 외부조건
파도가 바람에 의하여 보통 생성되기 때문에 바람과 파도 환경은 서로 연관된다9). 바람과 파도 환경 데이터는 Johannessen13)에 의하여 묘사된 실험적인 모델을 사용하였다. 이 환경 데이터를 근사화하기 위하여 Weibull 분포가 고려되었다. Weibull 분포는 식(3)에서 형상 매개변수(  : shape parameter), 척도 매개변수(
: shape parameter), 척도 매개변수(  : scale parameter)를 필요로 한다. 이 2개의 매개변수는 풍속의 평균(
: scale parameter)를 필요로 한다. 이 2개의 매개변수는 풍속의 평균(  )과 표준편차(
)과 표준편차(  )에 대한 함수이다14). 실측높이에서의 1시간 평균풍속(V)의 주변분포는 식(3)과 같다. Johannessen 모델은 Statfjord 환경에서 1973-1999년 기간에 동시에 일어나는 바람과 파도의 측정된 데이터를 기반으로 모델화되었다. 이 모델은 허브높이에서 주어진 평균 풍속에서 불규칙파의 유의 파고(Hs)와 최대 스펙트럼 주기(Tp)의 예상된 값들과 관련이 있다. 이러한 예상 값을 도출하기 위하여 식(3)~(8)에 표현하였다.
)에 대한 함수이다14). 실측높이에서의 1시간 평균풍속(V)의 주변분포는 식(3)과 같다. Johannessen 모델은 Statfjord 환경에서 1973-1999년 기간에 동시에 일어나는 바람과 파도의 측정된 데이터를 기반으로 모델화되었다. 이 모델은 허브높이에서 주어진 평균 풍속에서 불규칙파의 유의 파고(Hs)와 최대 스펙트럼 주기(Tp)의 예상된 값들과 관련이 있다. 이러한 예상 값을 도출하기 위하여 식(3)~(8)에 표현하였다.
 (3)
(3)
식(4)는 바람시어(Wind shear) 모델로서 널리 사용되는 power law를 채택하였다. 지수 a는 호수나 해양표면을 위해 제시되는 0.1 값을 사용하였다. V(H)는 실측높이에서의 평균 풍속(V)이다. V(z)는 허브 높이에서의 평균 풍속(Vmean)이다. H 는 평균 해수면이나 지면에서부터의 높이가 10 m이다. z는 허브에서의 높이이다.
 (4)
(4)
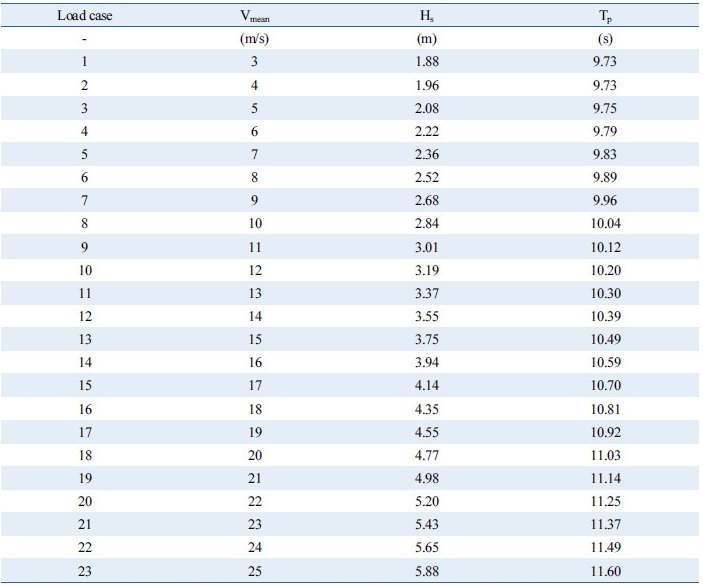
주어진 z, H, a, V(z) 값으로 식(4)의 V(H)를 도출할 수 있다. 식(5)는 유의파고(Hs)의 예상 값이다. V(z)는 선택된 값으로 3-25 m/s로서 Table 3의 Vmean이다. 𝛤는 Gamma 함수14)로 식(5)에서 유의파고를 결정하기 위하여 사용되었다. 유의 파고는 전체 파고 중에서 큰 순서대로 1/3에 해당하는 파고의 평균값으로 정의된다.
Table 3 Design load cases |
|
Vmean: 10-min mean wind speed at hub height, Hs: significant wave height; Tp: peak spectral period |
 (5)
(5)
식(6), (7)의  ,
,  , 풍속(V)에 의한 함수로서 희귀분석으로부터 파라미터 a1, a2, b1, b2 는 측정된 데이터를 기반으로 하여 얻어진 추정 계수이다. 여기서 추정된 계수 a1, a2, b1, b2, b3 는 각각 2, 0.135, 1.8, 0.1, 1.322 이다.
, 풍속(V)에 의한 함수로서 희귀분석으로부터 파라미터 a1, a2, b1, b2 는 측정된 데이터를 기반으로 하여 얻어진 추정 계수이다. 여기서 추정된 계수 a1, a2, b1, b2, b3 는 각각 2, 0.135, 1.8, 0.1, 1.322 이다.
 (6)
(6)
 (7)
(7)
식(4)로부터 얻어진 V(H)와 식(5), (6), (7)의 분포를 사용하여 예상된 유의파고(Hs)가 얻어질 수 있다. 측정된 데이터를 기반으로 모델화된 식에서 도출된 Vmean, Hs 를 고려할 때 스펙트럼 최대에 해당하는 주기(Tp)에 대한 로그정규분포는 Johannessen에 의해 제안되었고 예상된 E(Tp)는 식(8)과 같다.
 (8)
(8)
Table 3의 3~25 m/s의 평균 풍속(Vmean)은 동적인 구조(Tower base Fore-Aft bending moment), 종동요 운동(platform pitch), 출력(generator power) 반응을 확인하기 위하여 선택되었다. 선택된 Vmean을 고려할 때 E(Hs)와 E(Tp)의 값이 식(5), (8)의 실험적인 함수(analytical function)를 근거로 하여 해상상태(Sea states)를 정의하였고 Table 3에 나타내었다. Table 3에서 정의된 것처럼 선택된 Vmean, Hs, Tp의 조합으로 1시간 평균 풍속 데이터(3~25 m/s)에 대하여 시뮬레이션이 진행되었다.
7. 결과 및 토의
Fig. 5에 평균풍속이 증가함에 따른 종 동요(platform pitch) 운동 결과를 제시하였다. 종 동요 운동의 최대, 최소는 14 m/s 이후로 각각 4, -2° 정도를 유지한다. 종 동요 운동에서 –는 부유체가 바람 방향과 반대방향으로 종 동요 운동을 하고 +는 바람방향과 같은 방향으로 종동요 운동을 한다. 최대(4°), 최소(-2°) 값의 절대 값은 각각 4, 2이므로 바람방향과 일치하는 방향으로 종동요 운동이 더 크다는 것을 확인할 수 있다. 이것은 바람의 영향에 의하여 로터 추력이 발생하여 종동요 운동에 영향을 준다.
|
Fig. 5 Statistical characteristics of the platform pitch motion for combined dynamic wind and wave cases (Black symbol: floating spar buoy wind turbine with direct drive PMSG) |
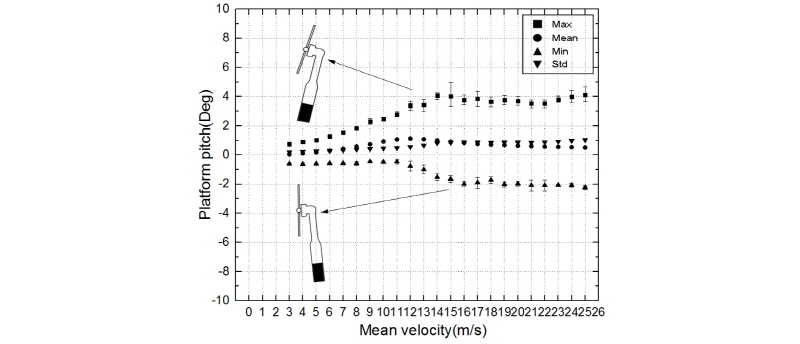
Fig. 6은 Table 3의 load case 6에서의 부유체 풍력 발전기의 종동요 운동에 대한 스펙트럼을 나타낸 것이다. 파도에 대한 스펙트럼은 0.1 Hz에서 가장 최고점의 에너지를 가진다15). Wave에 영향을 받는 부유체 종동요의 스펙트럼은 파도의 최고 주파수(0.1 Hz)와 근접한 0.098 Hz에서 최고점의 에너지량을 가진다.
|
Fig. 6 Platform pitch PSD of the platform pitch motion for load case 6(Vmean: 8m/s, Hs: 2.52, Tp: 9.89, random seed number: 1001) in Table 3 |
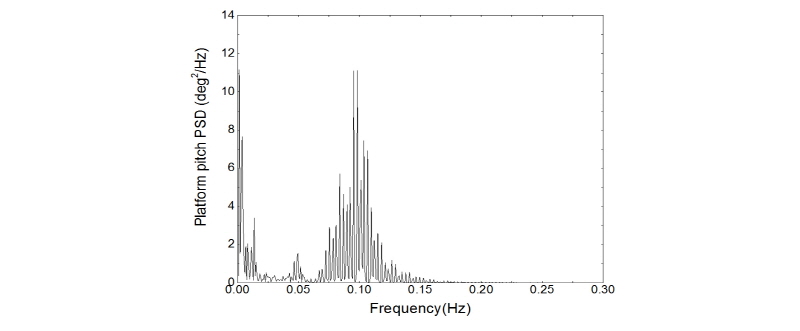
Fig. 7은 비 정상파, 난류 장 조건에서 평균 풍속에 따른 2 MW 영구자석 직접 구동형 육상 풍력발전기와 부유식 스파 부이 풍력 발전기의 타워 하단 전후 굽힘 모멘트를 비교한 그림이다. 각각의 최대, 평균, 최소, 표준편차의 값들은 난류 장에서 난수생성 값인 seed number 1001-1005의 난류 데이터를 공수탄성 코드인 HAWC2로 계산하여 통계화한 것이다. 계산 시간은 부유체가 정적 평형을 이루는 250초 후부터 1시간 동안 수행을 하였다. 육상의 경우 풍력 발전기의 13 m/s에서 타워 하단 굽힘 모멘트가 추력에 의하여 발생하여 정격 풍속 영역에서 최대가 되고 정격풍속에서 풍속이 더 증가하면 날개 피치제어가 날개피치각도를 증가시켜 추력은 감소하게 된다. 부유식 스파 부이 풍력발전기에 대한 타워 하단 하중의 경우 평균 풍속이 증가함에 따라서 정격풍속 이상에서 최대, 최소값이 각각 증가, 감소하여 표준 편차가 더 크다. 이러한 요인은 부유체 플랫폼의 종동요 운동의 상대속도변화로 볼 수 있다. 종동요 운동이 바람과 일치하는 방향으로 회전운동을 할 경우, 풍속과 부유식 풍력 발전기의 회전운동의 운동 방향 성분이 같아서 상대속도가 감소한다. 상대속도 감소로 인하여 풍력 발전기의 피치 날개 제어 시스템이 날개 피치 각도를 감소시켜 추력이 증가하게 되어 타워하단 굽힘 모멘트가 증가한다. 종동요 운동이 바람과 반대 방향으로 회전운동을 할 경우, 풍속과 부유식 풍력 발전기의 운동의 상대속도가 증가한다. 상대속도 증가로 인하여 풍력 발전기의 피치 날개 제어 시스템이 날개 피치각도를 증가시켜 추력이 감소하게 되어 타워 하단 굽힘 모멘트가 감소한다. 이 결과의 원인은 Fig. 8에서 확인할 수 있다. Fig. 8은 평균 풍속 25 m/s에서 육상 풍력 발전기와 부유식 스파 풍력 발전기의 시간에 따른 날개 피치 각도의 변화를 나타내었다. 부유식 풍력 발전기의 날개피치의 각도가 시간에 따라 육상보다 더 높은 최고점과 더 낮은 최저점들이 더 많이 발생한다. 이것은 부유식 풍력발전기 추력의 표준 편차를 더 크게 하고 추력에 의해 회전력을 일으키는 타워 하단 전후의 모멘트의 표준편차를 더 크게 한다.
|
Fig. 7 Tower base Fore-Aft bending moment for the subjected to irregular wave and turbulent wind actions: wind speed refer to the load cases in Table 3 |
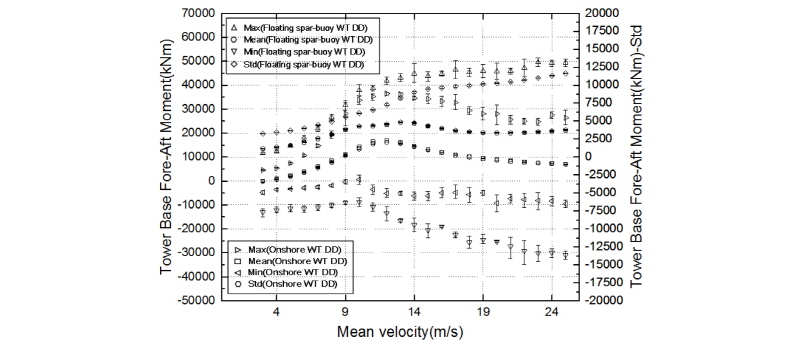
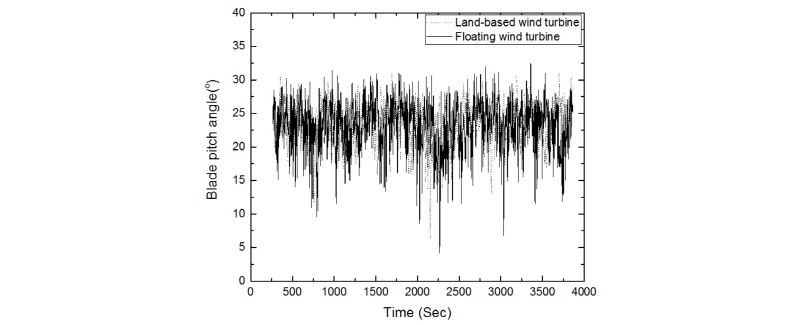
Table 4는 Fig. 7의 평균 풍속 25 m/s일 때 타워 하단 굽힘 모멘트 최대-최소 절대 값과 표준편차 값을 제시하였다. 육상 풍력 발전기 타워 하단 굽힘 모멘트의 절대 값은 40,560 kNm이고, 부유식 스파 부이 풍력 발전기에서의 절대 값은 94,448 kNm이다. 표준편차의 경우에 Fig. 8의 y축의 오른쪽에 크기를 제시하였다. 육상 풍력발전기의 표준편차 값이 3,618 kNm이고 부유식 스파 부이 풍력 발전기 표준편차는 11,580 kNm이다. 부유식 스파 부이 풍력 발전기의 표준편차는 육상 풍력 발전기보다 최대 220% 증가한다.

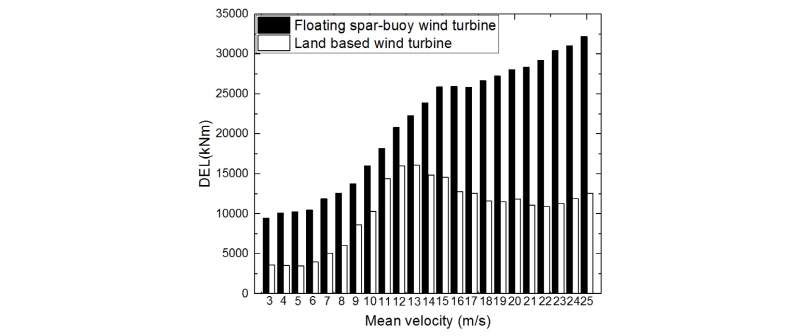
Fig. 9는 난류 장에서 난수생성 값인 seed number 1001의 조건에서 2 MW 영구자석 직접 구동형 육상 풍력발전기와 부유식 스파 부이 풍력 발전기의 타워 하단 굽힘 모멘트를 피로파괴 등가하중(DEL: Damage Equivalent Load)으로 표현하여 비교 제시하였다. DEL은 기계구조물에 작용하는 복합하중을 주파수 f의 단일 하중으로 환산한 것이다. 즉, T 시간 동안의 복합 하중에 의하여 피로 파괴가 일어나는 정도와 동등한 효과로 환산된 주파수 f의 단일하중의 크기로 변환시켜 나타낸 것이다3). 평균 풍속 25 m/s일 때 부유식 스파 부이 풍력 발전기 타워 하단에서의 DEL 값이 32,176 kNm 육상 풍력발전기 DEL은 12,578 kNm로서 부유식 스파 부이 풍력 발전기의 DEL은 육상 풍력 발전기의 DEL보다 최대 155% 증가하였다. 육상 풍력 발전기의 DEL은 정격 풍속 이후에는 감소한다. 이것은 정격 풍속 이후에 날개 피치제어 의한 추력의 감소로 인한 것이다. 부유식 스파 부이 풍력 발전기의 경우에 DEL 결과는 정격 풍속 이후에서도 증가한다. 정격 풍속 이후에서의 부유식 스파 부이 풍력 발전기의 DEL 증가요인은 종동요 운동으로 풍속과 부유식 스파 부이 풍력 발전기의 운동속도에 의한 상대속도의 최대, 최소 값의 변화에 의한 표준 편차의 증가로 볼 수 있다.
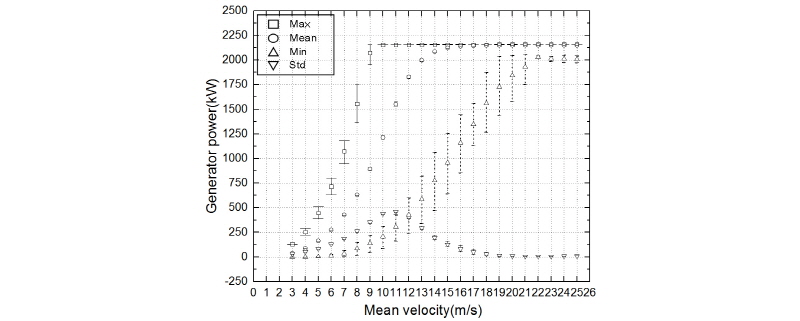
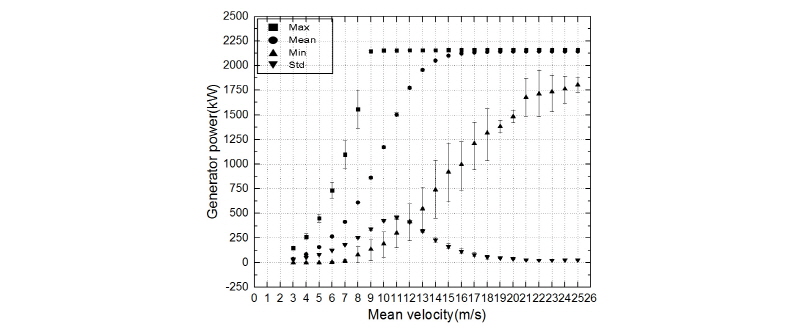
Figs. 10-11은 평균 풍속에 따른 육상, 부유식 풍력 발전기의 출력량에 대하여 보여주고 있다. 육상과 부유식 스파 부이 풍력발전기의 최대, 중간, 표준편차 값 비교 시 큰 차이가 없다. 그러나 최소 값은 육상보다 부유식 스파 부이 풍력 발전기에서 더 작다. Fig. 5의 종동요 운동이 최대 4°, 최소 –2° 에 도달하여 부유식 스파 부이 풍력 발전기 출력의 최소 값이 육상 풍력 발전기보다 작다. 이러한 주된 원인은 바람의 흐름에 상대적으로 부유체 구조물의 종동요 운동으로 인한 로터 평면(Rotor plane)의 변화에 의하여 출력에 영향을 미치기 때문이다. 부유식 풍력 발전기의 제어를 위하여 정격 풍속 이상에서의 제어 주파수(control frequency)를 타워의 고유 주파수(natural frequency)보다 낮게 조절함으로써 하중, 타워 움직임, 각속도 변화, 출력의 성능 향상에 대한 추가적인 연구가 필요하다16).
8. 결 론
본 연구에서는 직접 구동형 부유식 스파 부이 풍력 발전기에 대하여 구동환경(production)에서 HAWC2 프로그램으로 계산하여 바람하중과 파도하중에 의하여 유발된 타워 하단 굽힘 모멘트, 발전기 출력, 부유체 종동요 운동을 분석하였다. 부유식 스파부이 풍력 발전기는 바람과 파도에 의하여 지면에 고정된 육상 풍력 발전기보다 타워 하단 굽힘 모멘트의 표준편차가 증가하고 발전기 출력의 최소 값은 감소한다. 이러한 특성의 주요 발생원인은 부유체 구조물의 종동요 운동에 의한 상대속도 때문이다. 바람 방향과 일치하게 부유체가 종동요 운동을 하면 상대속도가 감소되어 날개피치제어가 추력을 증가시키고, 바람 방향과 반대로 부유체가 종동요 운동을 운동하면 상대속도가 증가되어 날개 피치제어가 추력을 감소시킨다.
