

1. 서 론
2. 연구방법
2.1 Solar Access의 개념과 계산 방법
2.2 360 VR 카메라와 스마트폰 애플리케이션을 이용한 주차면 Solar Access 분석
3. 연구지역 및 조사지점
4. 연구결과
4.1 A 주차장 구역 Solar Access 분석 결과
4.2 B 주차장 구역 Solar Access 분석 결과
5. 토 의
5.1 상용 장비와의 비교를 통한 Solar Access 분석 정확도 평가
5.2 Solar Access와 태양광 패널 에너지 발전량 사이의 연관성 분석
6. 결 론
기호 및 약어 설명
: 그림자 영향을 고려하지 않을 때 태양광 패널에 도달할 수 있는 전체 직달 일사량(W/m2)
: 그림자의 영향을 고려할 때 태양광 패널에 실제 도달할 수 있는 직달 일사량(W/m2)
1. 서 론
최근 차량의 지붕, 보닛, 옆문 등에 태양광 패널이 설치되어 있어 주행 또는 주차 중 태양에너지를 이용해 자가 충전이 가능한 태양광 전기차(solar-powered electric vehicle)가 주목받고 있다. Hyundai Motor Group (2020)1), Aptera Motors (2023)2), Lightyear (2023)3), Toyota Motor Corporation (2021)4), Mercedes-Benz (2023)5), Sono Motors (2023)6) 등 다수의 완성차 기업들이 태양광 전기차 모델을 발표했으며, Allied Market Research (2020)7)는 세계 태양광 전기차 시장이 2030년에는 연간 4.5조 원 규모로 성장하리라 전망하였다.
태양광 전기차의 보급이 본격적으로 확대될 시기를 대비하여 태양광 전기차의 효율적인 운용 방법을 제시하고, 관련 정책의 수립을 지원하기 위한 다양한 연구들이 시도되었다. Lv et al. (2016)8)은 태양광 전기차의 발전량을 증가시키기 위한 도로별 차량 이동속도 설정에 관한 연구를 수행하였고, Hasicic et al. (2017)9)과 Jiang et al. (2017)10)은 태양광 전기차의 발전량을 최대로 할 수 있는 차량 이동 경로를 분석하였다. Rehman et al. (2020)11)과 Oh et al. (2020)12)은 버스 지붕에 태양광 패널을 설치할 경우를 가정하여 뉴질랜드 Invercargil 지역과 대한민국 서울시 관악구 지역을 대상으로 버스 노선에 대한 태양광 발전 잠재량을 추정하였다. Kim et al. (2022)13)은 열차 지붕에 태양광 패널을 설치하는 것을 가정하여 대한민국 KTX 경부선에 대한 태양광 발전 잠재량을 추정하였다. Baek and Choi (2022)14)는 도심지에서 태양광 전기차의 최적 이동 경로 분석을 위해 필요한 도로망 그림자 데이터베이스의 효과적인 구축 방법을 제안하였고, Park et al. (2022)15)은 태양광 전기차의 패널 부착 위치, 주변 지형, 이동 방향을 고려한 발전 잠재량 평가와 검증을 위한 실험적 연구를 수행하였다.
태양광 전기차가 주차 중인 상황을 고려한 연구도 수행되었다. Choi et al. (2021)16)은 어안렌즈 카메라로 촬영한 Sky 이미지를 분석하여 대학 캠퍼스에서 태양광 전기차 전용 주차 구역의 최적 입지를 선정하는 연구를 수행하였다. Baek and Choi (2022)17)는 주차장의 주차면에 따라 주변 건물에 의해 생성되는 그림자가 태양광 전기차의 발전량에 미치는 영향을 분석하였다. 그러나 태양광 전기차 운전자가 차량을 주차할 때 주차면 주위의 환경을 실시간으로 분석하여 태양광 발전에 유리한 주차면을 선택할 수 있도록 하는 의사결정 지원 도구에 대한 개발은 현재까지 진행되지 않았다. 기존 연구(Choi et al., 2021)16)에서 Suneye 210 (Solmetric Corporation, 2011)18)과 같은 어안렌즈 카메라를 이용하여 주차면 주위의 수광장애 요인을 분석한 사례가 있으나, 일상생활에서 운전자들이 Suneye 210과 같은 장비를 차량에 구비하고 있기는 어렵다. 또한, Suneye 210과 같은 장비로 주차면 주위의 Sky 이미지를 얻기 위해서는 장비의 설치와 영상 촬영에 많은 시간이 소요되며, Sky 이미지 분석을 통한 주차면 선택에서도 전문적인 지식이 요구된다. 따라서 태양광 전기차 운전자들이 차량 주차 시 편리하게 사용할 수 있는 도구에 관한 개발이 필요하다.
본 연구에서는 차량 지붕에 설치된 보급형 360 VR 카메라와 스마트폰을 이용하여 주차면 주위의 Sky 이미지를 촬영하고, 이미지 분석을 통해 수목, 건물 등과 같은 수광장애 요인을 탐지하여 운전자가 설정한 주차 예정 시간 동안의 Solar Access 값을 계산해주는 시스템을 개발하였다. 개발된 시스템을 부경대학교 대연캠퍼스 내 해양 공동연구관 주차장과 양어장 주차장에서 실증하였다. 그 결과 차량 운전자가 주차장에서 비어 있는 주차면의 Solar Access 값을 실시간으로 확인하고, Solar Access 값을 비교하여 태양광 발전에 유리한 주차면을 선택할 수 있음을 확인하였다. 또한, Suneye 210 어안렌즈 카메라와의 비교실험과 차량 지붕에 설치된 태양광 패널의 전력 측정 실험을 통해 개발된 시스템의 신뢰성을 검증하였다.
2. 연구방법
2.1 Solar Access의 개념과 계산 방법
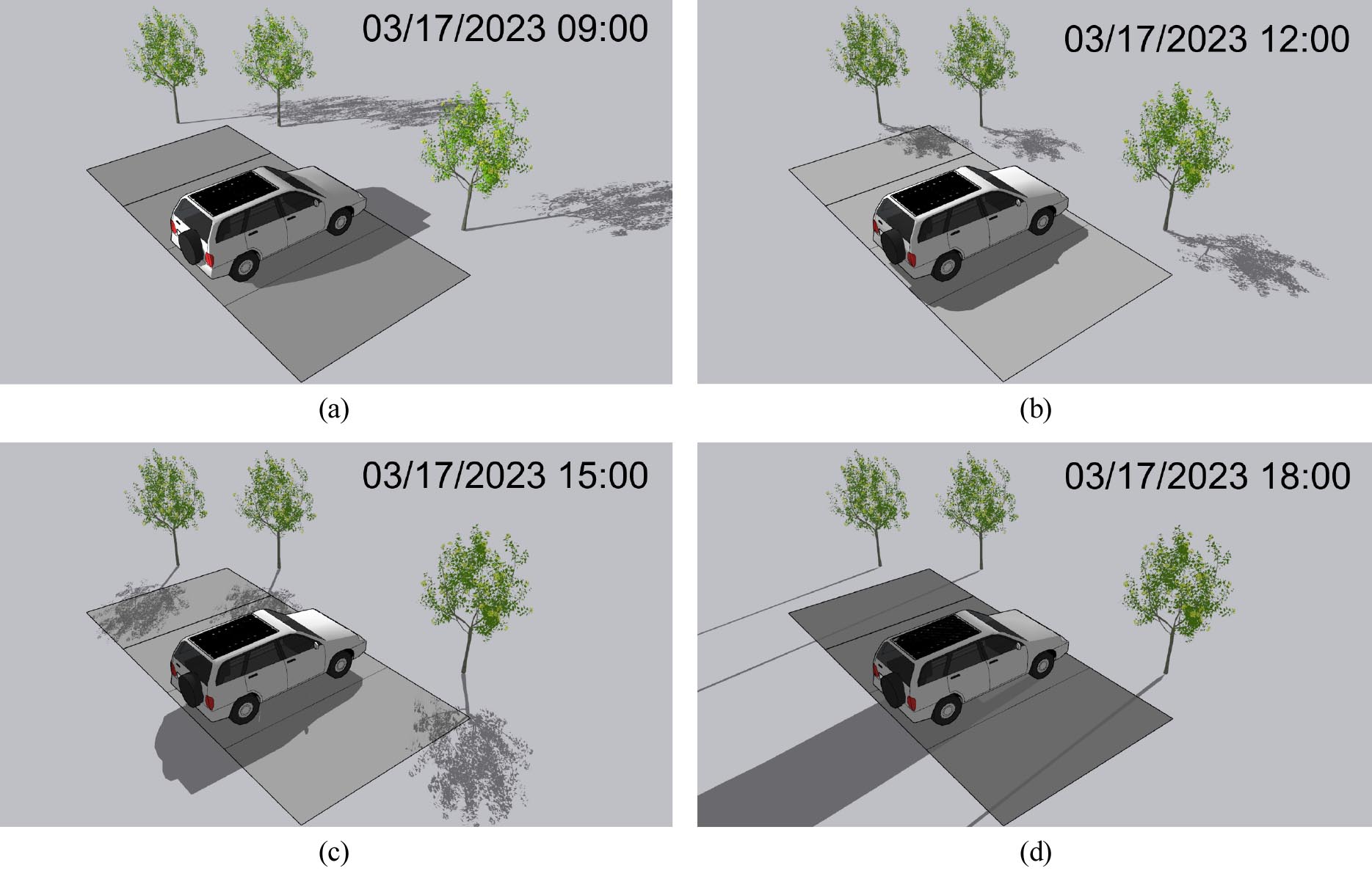
태양광 전기차가 주차될 구역 주변에 건물, 수목 등과 같은 수광장애 요인이 존재할 때 태양의 위치에 따라 특정 시기에는 태양광 패널에 그림자가 생성되어 발전 효율이 낮아질 수 있다(Fig. 1). 따라서 태양광 전기차의 최적 주차 구역을 선정하기 위해 주차 구역 주변의 수광장애 요인에 의한 그림자 영향을 고려해야 한다. 태양광 패널에 그림자가 생성되는 경우 태양광 발전 효율이 급격하게 저하되므로 그림자가 형성되는 지점은 태양광 전기차의 주차 구역으로 적합하지 않다.
본 연구에서는 태양광 전기차의 주차 구역에 생성될 수 있는 그림자의 영향을 정량적으로 분석하기 위한 지표 값으로 Solar Access (%)를 사용하였다. Solar Access란 일정 시간 동안 주변의 건물, 수목과 같은 수광장애 요인들을 고려하지 않을 때 태양광 패널에 도달할 수 있는 전체 직달 일사량 중 수광장애 요인들을 고려할 때 그림자의 영향을 받지 않고 태양광 패널에 실제 도달할 수 있는 직달 일사량의 비율을 나타낸 것으로 식(1)과 같이 계산할 수 있다.
식(1)에서 는 그림자 영향을 고려하지 않을 때 태양광 패널에 도달할 수 있는 전체 직달 일사량(W/m2), 는 그림자의 영향을 고려할 때 태양광 패널에 실제 도달할 수 있는 직달 일사량(W/m2)을 의미한다. 태양광 패널이 일정 시간 동안 그림자의 영향을 전혀 받지 않는다면 해당 기간의 Solar Access 값은 100%가 되며, 수광장애 요인으로 인해 태양광 패널 전체가 그림자로 가려진다면 해당 기간의 Solar Access 값은 0%가 된다.
2.2 360 VR 카메라와 스마트폰 애플리케이션을 이용한 주차면 Solar Access 분석
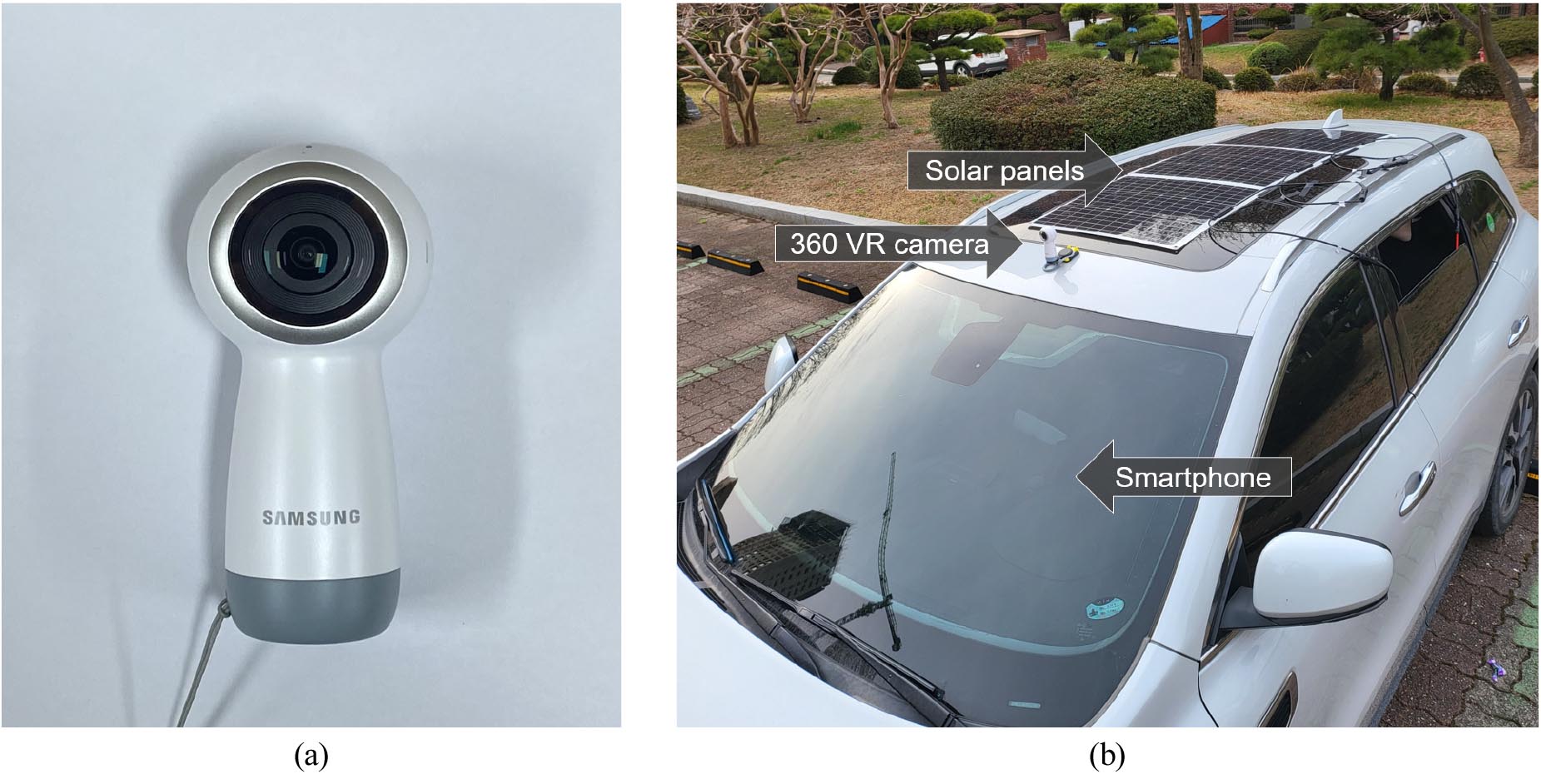
본 연구에서는 주차면의 Solar Access를 분석하여 태양광 전기차의 최적 주차 구역을 찾기 위해 360 VR 카메라와 스마트폰을 이용하였다. Fig. 2a는 보급형 360 VR 카메라인 Samsung Gear 360 장비를 보여준다. 360 VR 카메라는 360° 반경의 주변 환경을 동영상 및 사진으로 촬영하고 모바일 기기로 전송한다. 본 연구에서는 360 VR 카메라를 차량의 지붕에 설치하였다(Fig. 2b).
360 VR 카메라를 이용하여 주차장 주변의 영상을 촬영한 후, 수목, 건물 등과 같은 수광장애 요인을 분석하여 태양광 전기차의 최적 주차 구역을 찾아주는 스마트폰 애플리케이션(쏠파킹)을 개발하였다. 애플리케이션 개발도구로는 MIT App Inventor (MIT, 2023)19)를 이용하였다. MIT App Inventor는 구글이 개발한 오픈소스 웹 애플리케이션으로 Android만 지원했었지만, 2021년부터는 iOS도 지원한다. 애플리케이션 개발에 필요한 그래픽 사용자 인터페이스를 제공하며, 디자인 화면에서 필요한 컴포넌트들을 배치하여 애플리케이션 인터페이스를 설계하고 블록 편집기에서 블록 코딩 방식으로 애플리케이션의 기능을 개발할 수 있다(Fig. 3).

본 연구에서 개발된 쏠파킹 애플리케이션의 Solar Access 분석 절차는 Fig. 4와 같다. 운전자가 주차장에 도착하여 애플리케이션을 실행하면 조사지점의 GPS 위/경도 좌표와 날짜가 애플리케이션 화면에 자동으로 입력된다. 이 정보는 해당 지점에서의 태양 경로를 계산하는 데 사용된다. 다음으로 운전자는 예상되는 주차 시작과 종료 시각을 화면에 입력한다(Fig. 5a). 이어서 촬영 버튼을 누르면 차량 지붕에 설치된 360 VR 카메라와 무선 연결되어 원격으로 조사지점 주변 영역을 촬영하고 180° 반구형 영역의 Sky 이미지를 생성한다(Fig. 5b). 다음으로 분석 버튼을 누르면 촬영된 Sky 이미지의 RGB 성분 값들을 고려하여 하늘 영역과 수광장애물(건물, 수목 등) 영역으로 이미지를 자동 분류하며, 조사지점의 위/경도 좌표를 반영하여 계산된 태양 경로가 이미지에 중첩되어 나타난다. 이때 태양 경로상에 수광장애 요인이 존재한다면 해당 시점에서는 그림자가 형성된다고 해석할 수 있다. 사용자가 설정한 주차 시작과 종료 시각을 반영하여 주차시간 동안의 평균 Solar Access가 계산되며 그 결과가 화면 하단에 표출된다(Fig. 5c). 마지막으로 공유 버튼을 누르면 태양 경로상에 수광장애 요인이 존재하는 시점은 1, 수광장애 요인이 존재하지 않는 시점은 0으로 표시한 연간 shading matrix를 클라우드 저장소로 전송하거나 모바일 기기 내부 저장소에 저장한다.
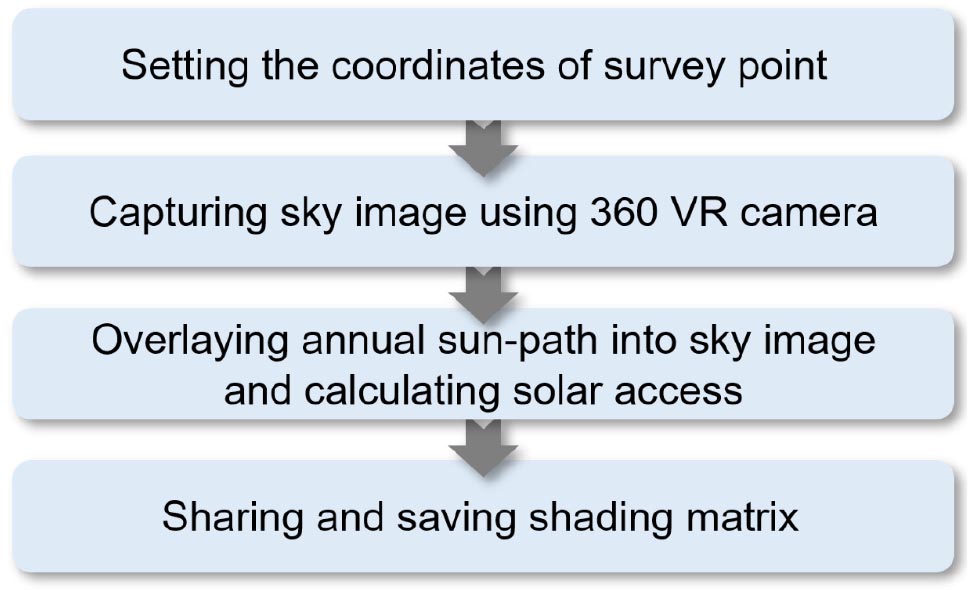
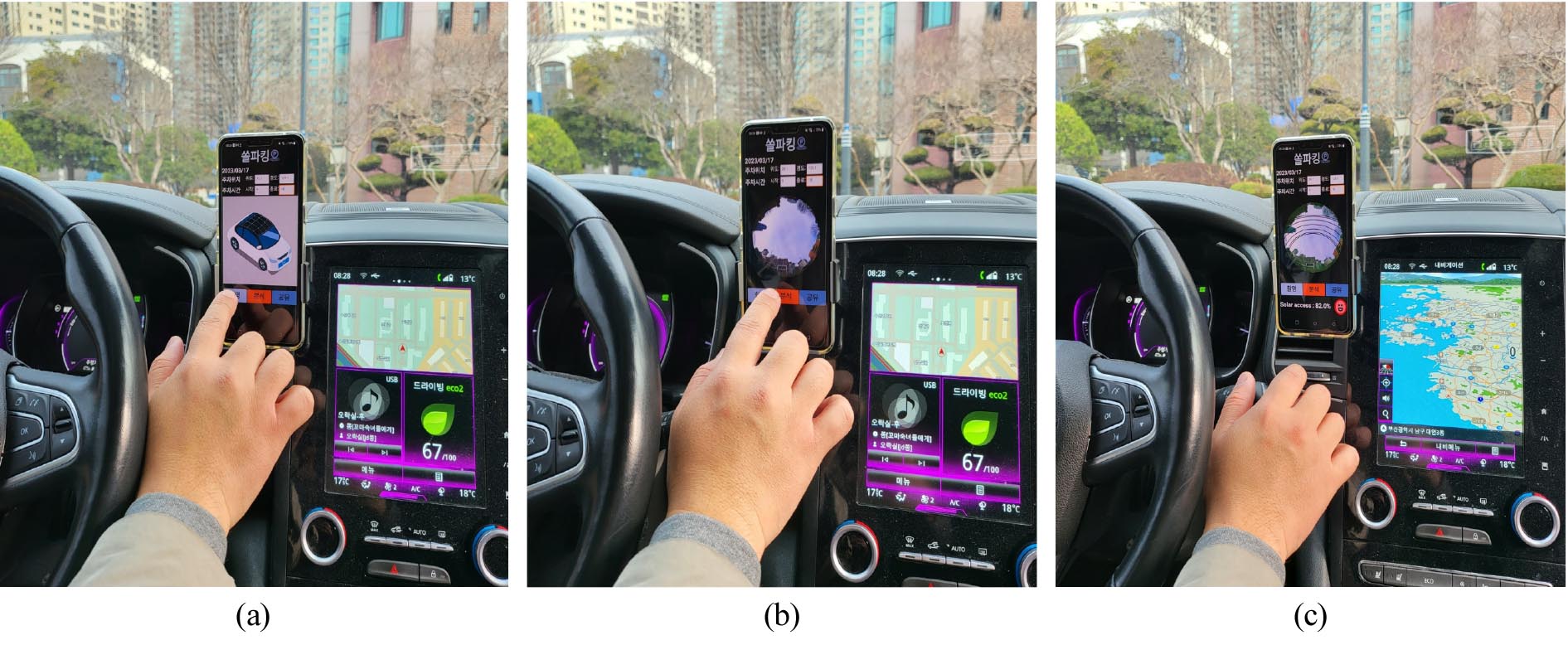
Fig. 5
Photos showing the stages of using the SOL-PARKING app. (a) Stage 1: press the record button to capture sky image after setting the reserved parking time, (b) Stage 2: press the analysis button to classify the sky image and calculate the sun path, (c) Stage 3: check the average solar access value for the reserved parking time at the bottom of the screen
3. 연구지역 및 조사지점
본 연구에서는 부경대학교 대연캠퍼스에서 현재 운영되고 있는 주차장 중 2개의 노외주차장을 대상으로 개발된 시스템을 실증하였다. 부경대학교 대연캠퍼스는 부산광역시 남구에 위치하며 해발고도는 3 m ~ 10 m이고 면적은 약 359,000 m2이다. 북쪽으로는 황련산, 남쪽으로는 용호만과 접해있고 동쪽에는 초고층의 아파트가 있다. 캠퍼스 내에는 강의동, 연구동, 기숙사와 같은 건물이 37개 있고, 건물의 높이는 2층에서 20층까지 다양하다.
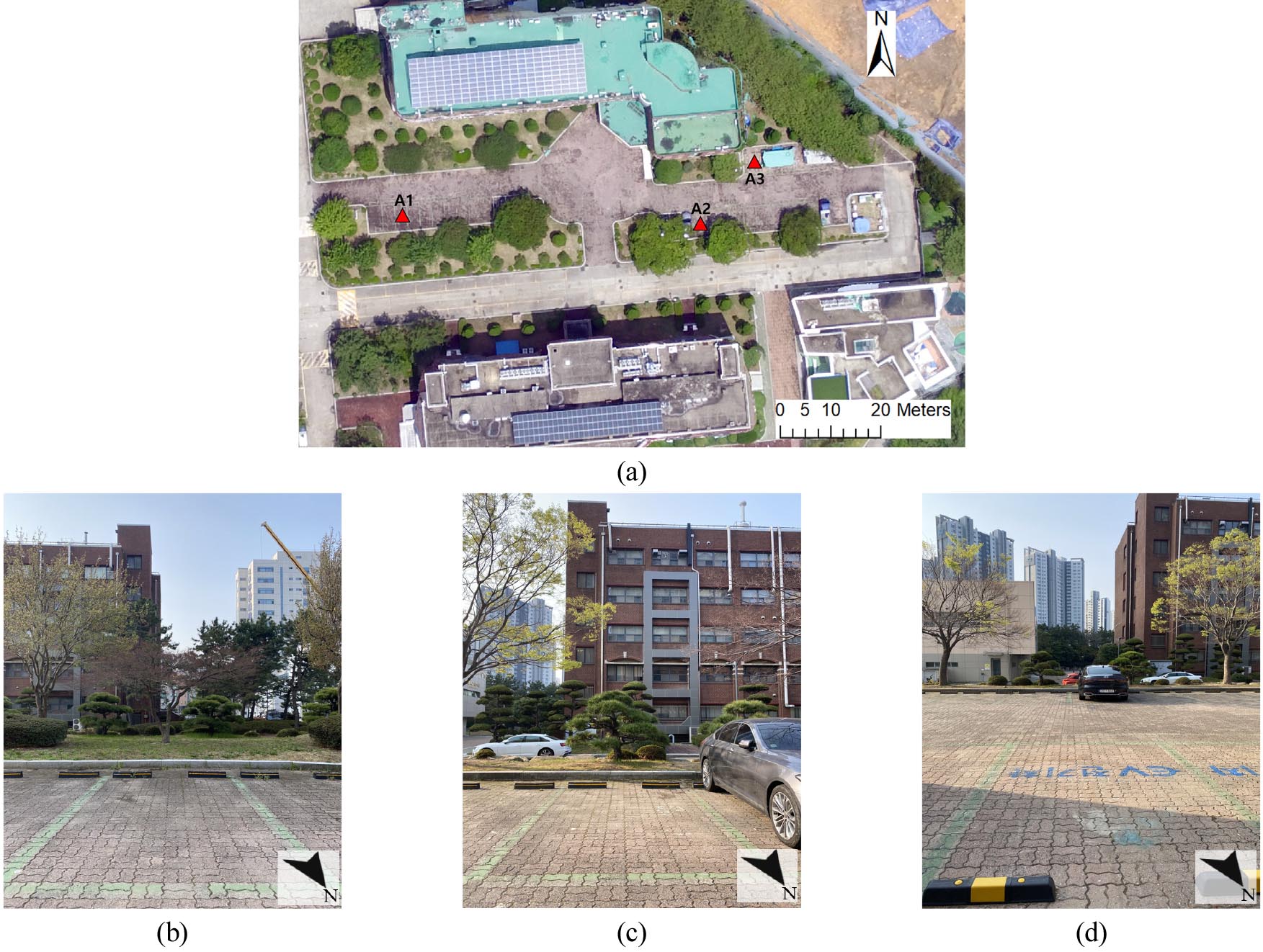
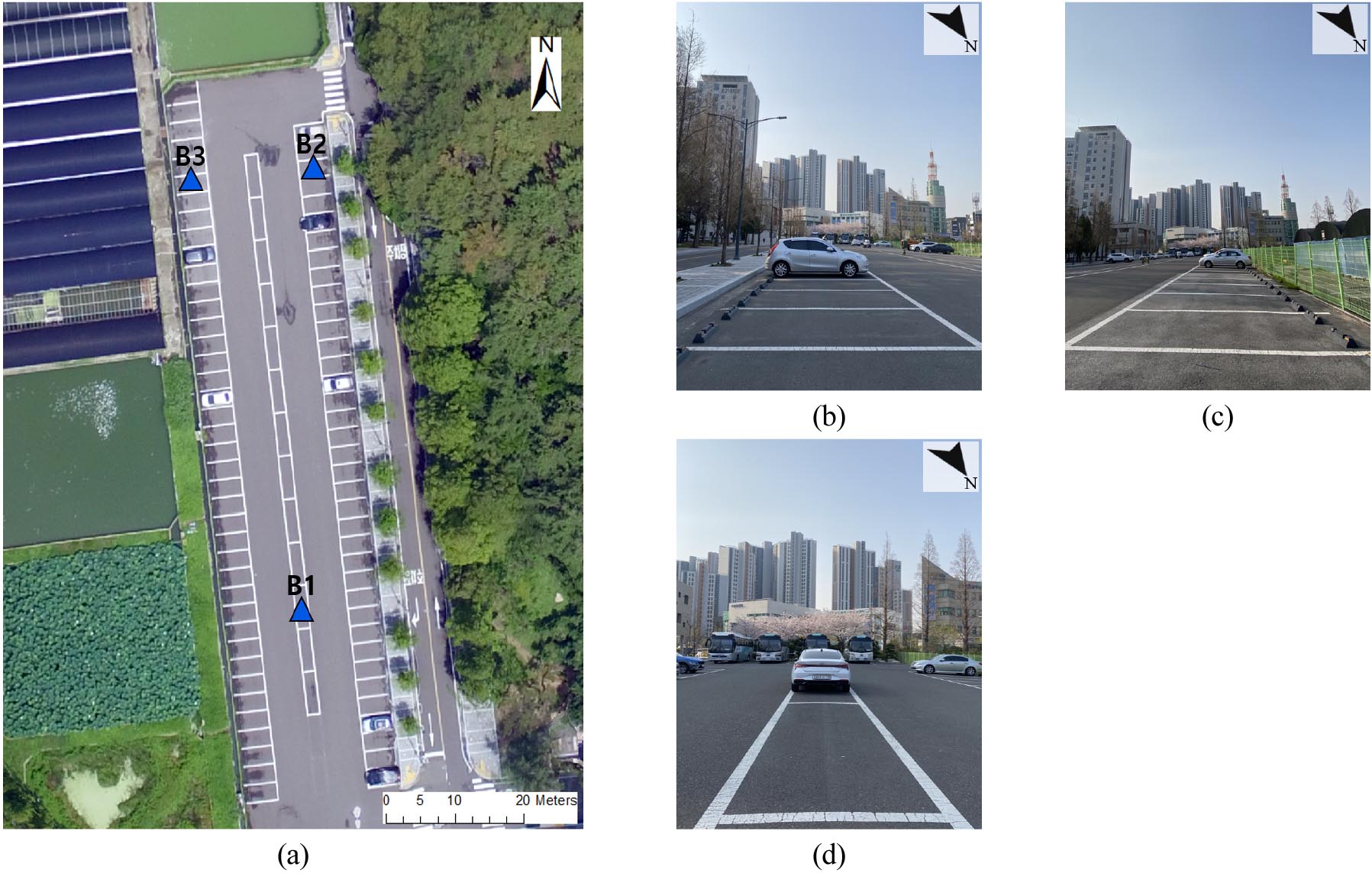
2개의 노외주차장은 해양 공동연구관 주차장(A 주차장)과 양어장 주차장(B 주차장)이다. A 주차장에는 30개의 주차 구역이 있고 주차장 동쪽에는 초고층의 아파트가 위치하며 남쪽에는 5층 높이의 장영실관 건물이 있다. B 주차장에는 90대의 차량이 주차할 수 있으며 주차장 동쪽에는 식생이 분포한다. B 주차장의 남동쪽에는 14층 높이의 공학관 건물이 위치하며 남쪽에는 초고층 아파트가 위치한다. 본 연구에서는 A 주차장의 3개의 주차면(A1, A2, A3)과 B 주차장의 3개의 주차면(B1, B2, B3)을 조사지점으로 선정하여 개발된 시스템을 적용하였다. 각각의 주차면에서 Solar Access를 계산하고 그 값을 비교하여 태양광 발전에 상대적으로 유리한 주차 구역을 분석하였다. Fig. 6과 Fig. 7은 A 주차장과 B 주차장 조사지점의 위치와 조사지점 주변 전경을 보여준다.
4. 연구결과
4.1 A 주차장 구역 Solar Access 분석 결과
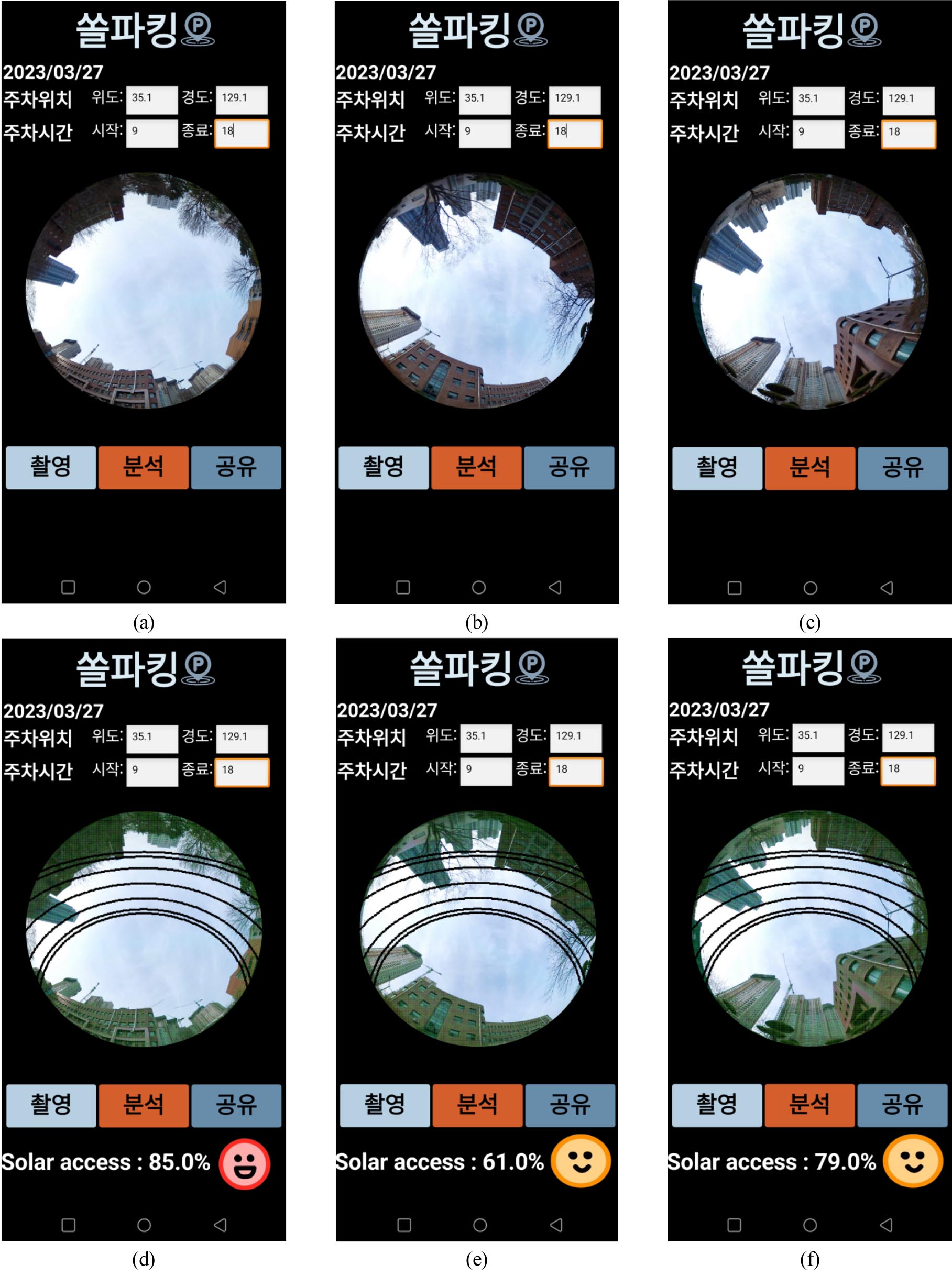
A 주차장의 3개 조사지점(A1, A2, A3)에서 360 VR 카메라를 이용하여 Sky 이미지를 촬영하고 쏠파킹 애플리케이션으로 Solar Access를 분석하였다. Fig. 8은 각 조사지점의 Sky 이미지와 Solar Access 계산 결과를 표시한 쏠파킹 애플리케이션의 화면을 보여준다. 애플리케이션은 조사지점의 GPS 좌표를 인식하여 위/경도 좌표를 자동으로 입력하였고 주차 시작과 종료 시각을 9시부터 18시까지 일과시간으로 설정하였다. Sky 이미지 내 수광장애 영역은 초록색으로 표시되었으며, 조사지점의 연간 태양 경로가 이미지에 중첩되어 나타났다. 주차 예정 시간(9시 ~ 18시) 동안 A1, A2, A3 조사지점에서의 Solar Access는 각각 85%, 61%, 79%로 분석되었으며, 최적 주차 구역은 Solar Access가 가장 높은 A1 지점으로 선정되었다. 운전자는 쏠파킹 애플리케이션을 이용하여 실시간으로 Sky 이미지를 촬영하고 Solar Access를 계산함으로써 주차 예정 시간 동안의 최적 주차 구역을 효과적으로 선정할 수 있었다.
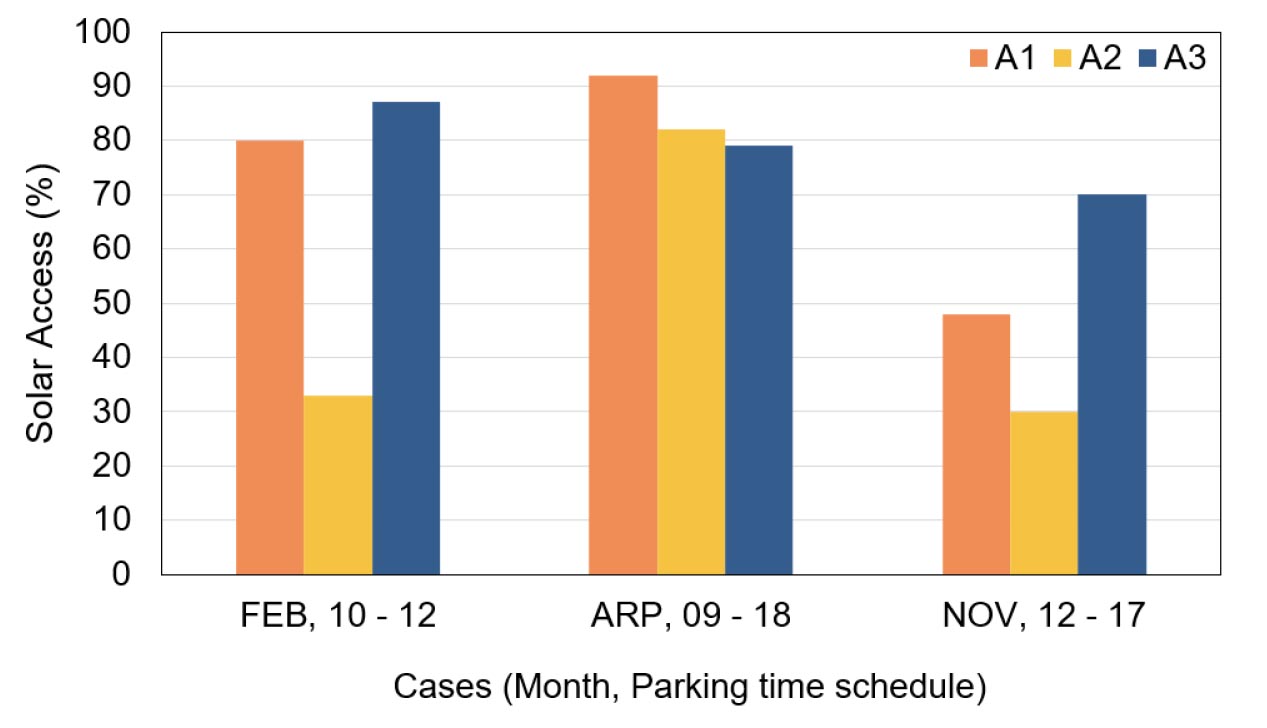
운전자의 주차 예정 시간은 주차 목적(출퇴근, 식사 등)에 따라 여러 경우로 설정될 수 있다. 주차 예정 시간을 6개 시간대(9시 ~ 12시, 10시 ~ 12시, 11시 ~ 13시, 12시 ~ 17시, 9시 ~ 18시, 10시 ~ 17시)로 달리 설정하여 조사지점별로 월간 Solar Access를 분석하였다(Table 1). 그중 3개의 주차계획(2월 10시 ~ 12시, 4월 9시 ~ 18시, 11월 12시 ~ 17시)에 대해 분석된 Solar Access를 비교하고 최적 주차 구역을 선정하였다(Fig. 9). 1번 주차계획과 3번 주차계획에 대해서는 A3 주차 구역에서 각각 87%, 70%로 가장 높은 Solar Access가 산정되어 A3 주차 구역이 최적 주차 구역으로 선정되었다. 반면에 2번 주차계획에 대해서는 A1 주차 구역에서 92%의 가장 높은 Solar Access가 산정되어 A1 주차 구역이 최적 주차 구역으로 선정되었다. 주차 예정 시간과 주차 날짜가 달라짐에 따라 주변 수광장애 요인에 의한 그림자 영향이 변화하여 서로 다른 주차면이 태양광 전기차의 최적 주차 구역으로 선정되었다.
Table 1
Results of calculating monthly Solar Access at the parking lot A (A1, A2, A3) according to the parking schedule
4.2 B 주차장 구역 Solar Access 분석 결과
B 주차장의 B1, B2, B3 주차 구역에 대해 쏠파킹 애플리케이션을 이용하여 Solar Access를 산정하고 최적 주차 구역을 선정하였다. 주차 예정 시간은 A 주차장과 마찬가지로 9시부터 18시로 설정하였다. Fig. 10은 세 주차 구역에서 쏠파킹 애플리케이션으로 Sky 이미지를 촬영하고 Solar Access를 분석한 결과이다. B1, B2, B3 지점에서 Solar Access는 각각 82%, 86%, 91%로 분석되었다. B1 조사지점에서 3월 오전 시간대의 태양 경로에 건물로 인한 그림자 영향이 발생하여 Solar Access의 값이 가장 낮게 나타났다.
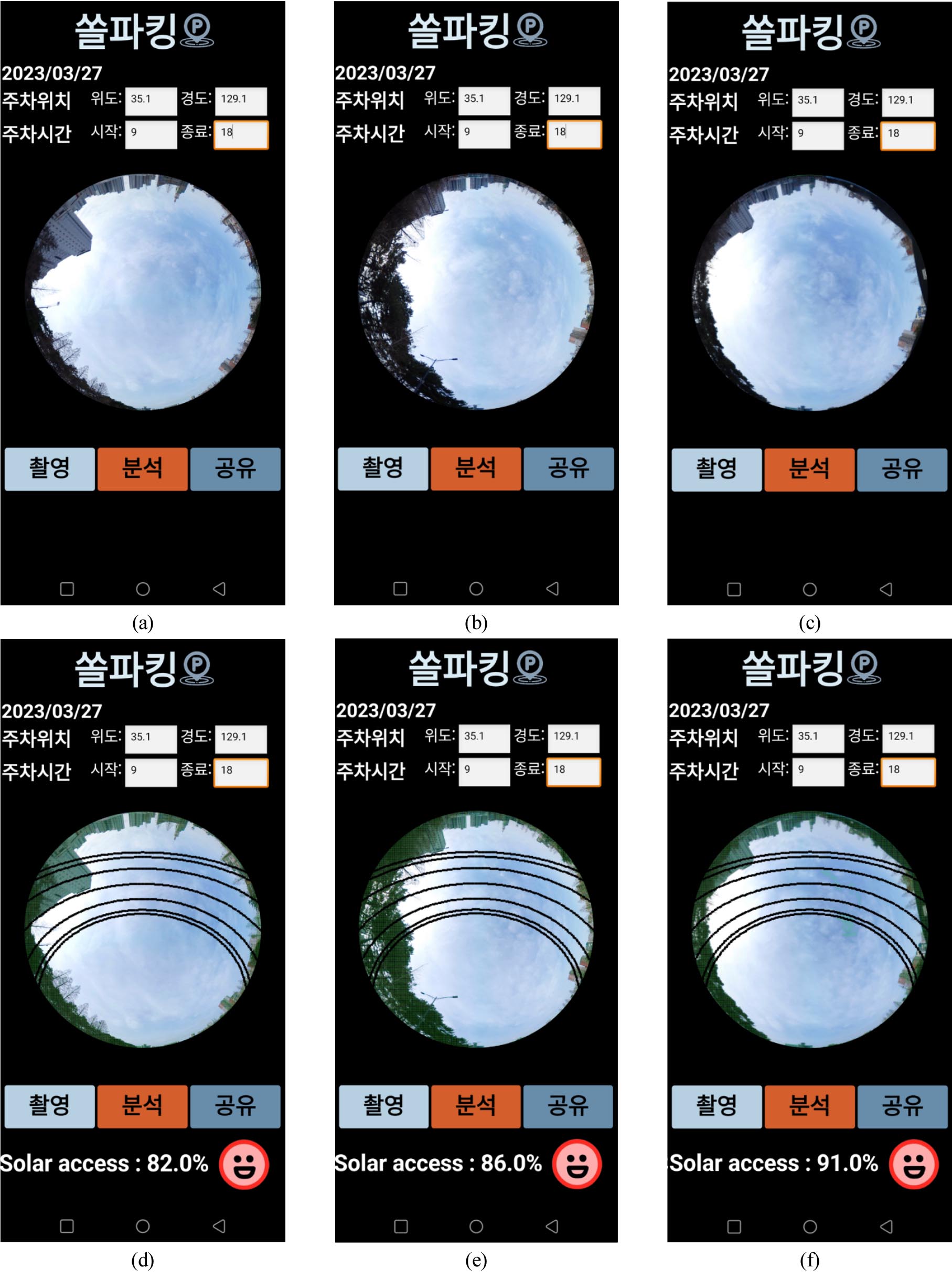
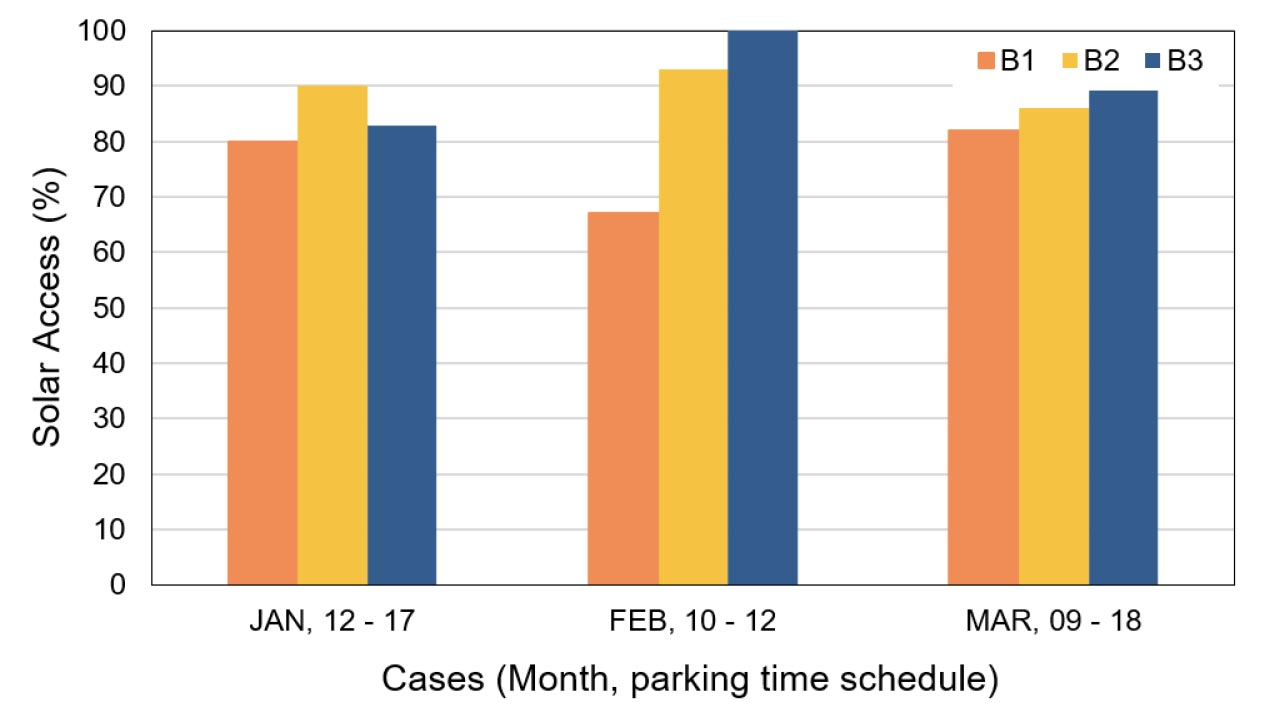
Table 2는 주차 예정 시간을 오전, 오후, 종일 등 6개 시간대로 구분하여 Solar Access를 산정한 결과이다. 그중 세 개의 주차계획(1월 12시 ~ 17시, 2월 10시 ~ 12시, 3월 9시 ~ 18시)에 대해 Solar Access를 비교하고 최적 주차 구역을 선정하였다(Fig. 11). 1월 12시 ~ 17시 주차계획에서는 B2 주차 구역이 최적 주차 구역으로 선정되었으나(Solar Access 90%), 나머지 주차계획에 대해서는 B3 주차 구역이 최적 주차 구역으로 선정되었다(Solar Access 100%, 91%). B3 조사지점이 다른 지점보다 1월, 2월, 3월의 오전 시간대에 수목과 건물에 의한 그림자 영향이 적어서 Solar Access가 높게 산정된 것으로 판단된다. 이를 통해 주차 시점이 달라지면 같은 주차장 내에서도 서로 다른 주차면이 최적 주차 구역으로 선정될 수 있음을 확인하였다. 또한, 운전자는 쏠파킹 애플리케이션을 이용하여 다수 주차면에서 다양한 주차 시점별로 Solar Access 계산하고 정량적으로 비교함으로써 최적 주차 구역을 효과적으로 결정할 수 있음을 알 수 있었다.
Table 2
Results of calculating monthly Solar Access at the parking lot B (B1, B2, B3) according to the parking schedule
5. 토 의
5.1 상용 장비와의 비교를 통한 Solar Access 분석 정확도 평가
본 시스템의 Solar Access 분석 정확도를 평가하기 위해 상용 장비의 Solar Access 계산 결과와 본 연구의 결과를 비교하였다. 비교에 사용된 상용 장비는 Suneye 210 (Solmetric Corporation, 2011)18)으로 태양광 시스템 설치부지 선정을 위한 의사결정 도구로 널리 활용되고 있다. 이 장비는 초광각 어안렌즈 카메라를 이용하여 180° 범위의 반구형 sky 이미지를 촬영하고 이미지 내 수광장애 영역과 하늘 영역을 자동으로 이진 분류한다. 조사지점의 위/경도 좌표를 반영하여 시기별 태양 경로를 Sky 이미지에 표시하고 수광장애 요인에 의해 발생할 수 있는 그림자 영향을 고려하여 시기별 Solar Access를 계산한다.
Fig. 12와 Fig. 13은 A 주차장과 B 주차장에서 Suneye 210 장비로 Sky 이미지를 촬영하고 이미지 내 수광장애 영역(녹색)과 하늘 영역(황색)을 이진 분류한 것이다. 360 VR 카메라로 촬영한 이미지(Fig. 8, Fig. 10)와 비교했을 때 Sky 이미지에 포착된 수광장애 영역이 모든 조사지점에서 서로 일치함을 알 수 있다. 또한, Sky 이미지에 표시된 시기별 태양 경로가 서로 일치하였다.
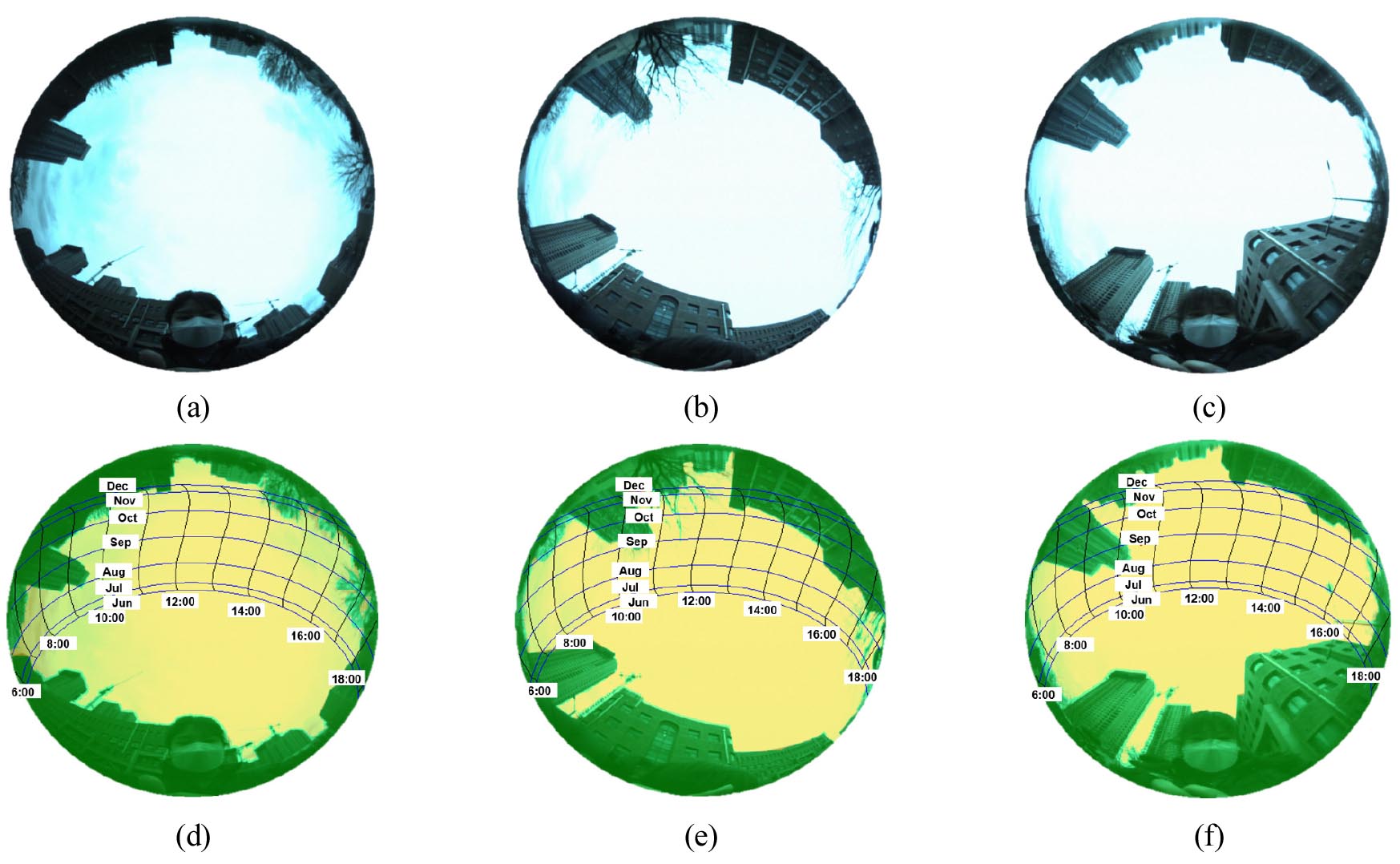
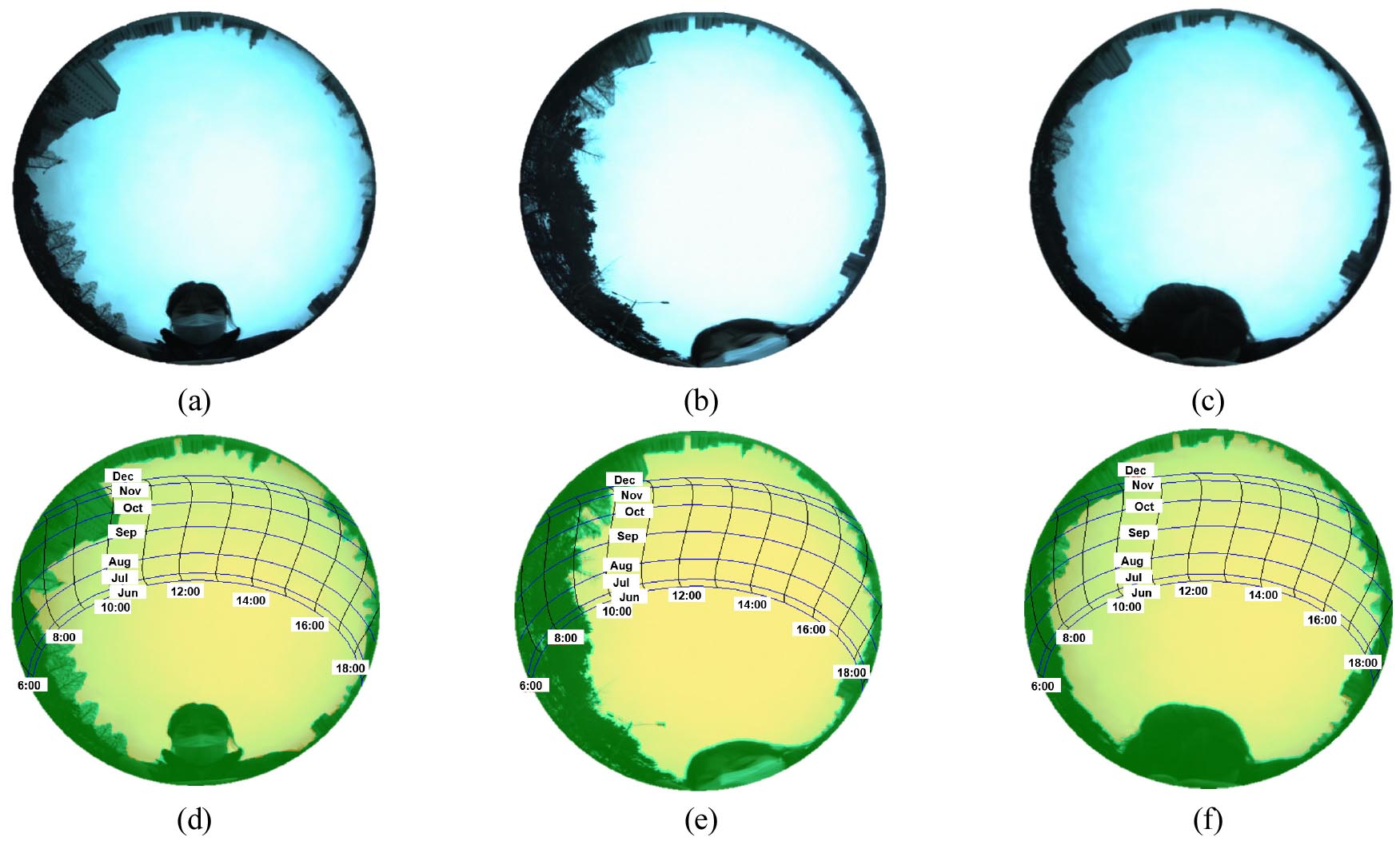
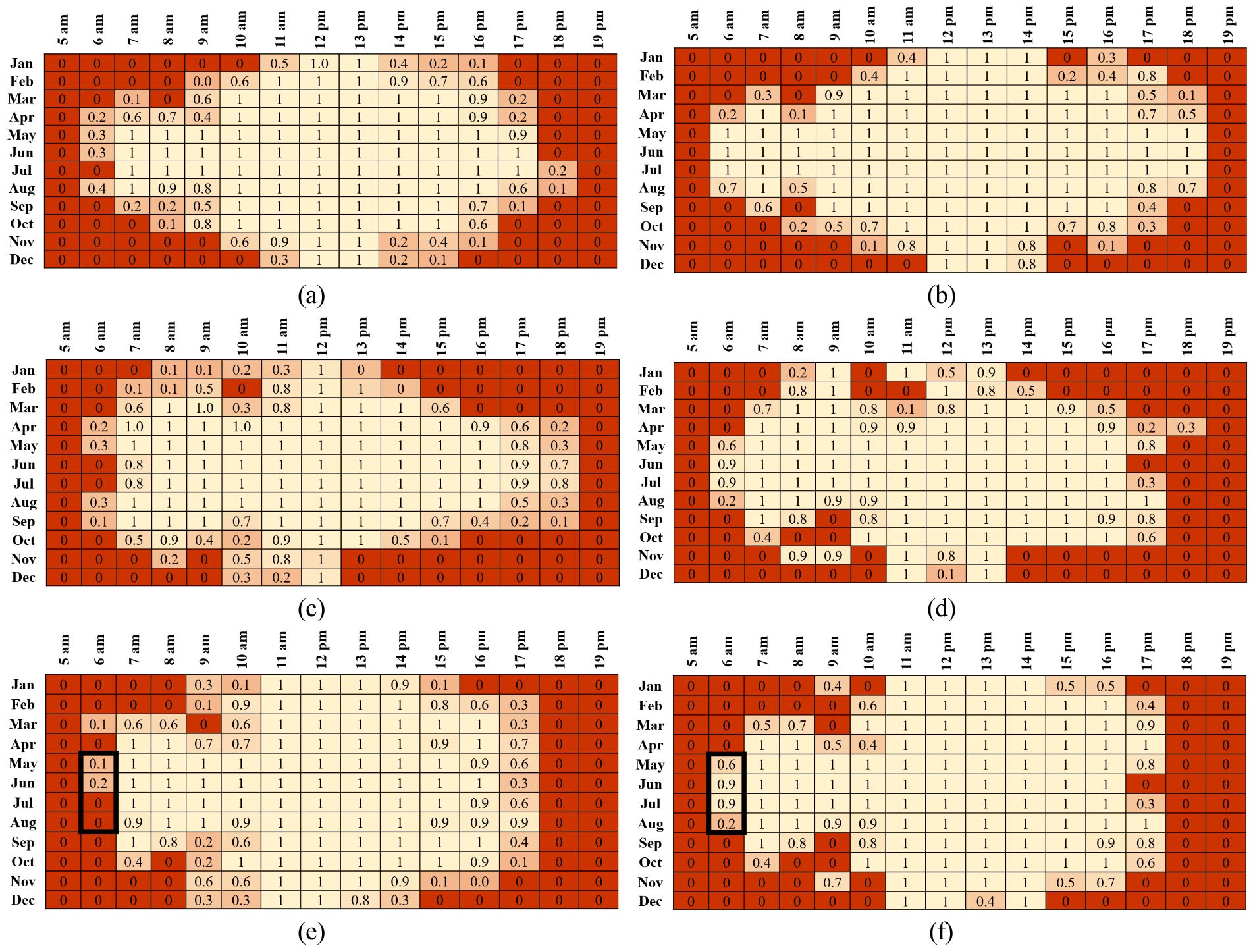
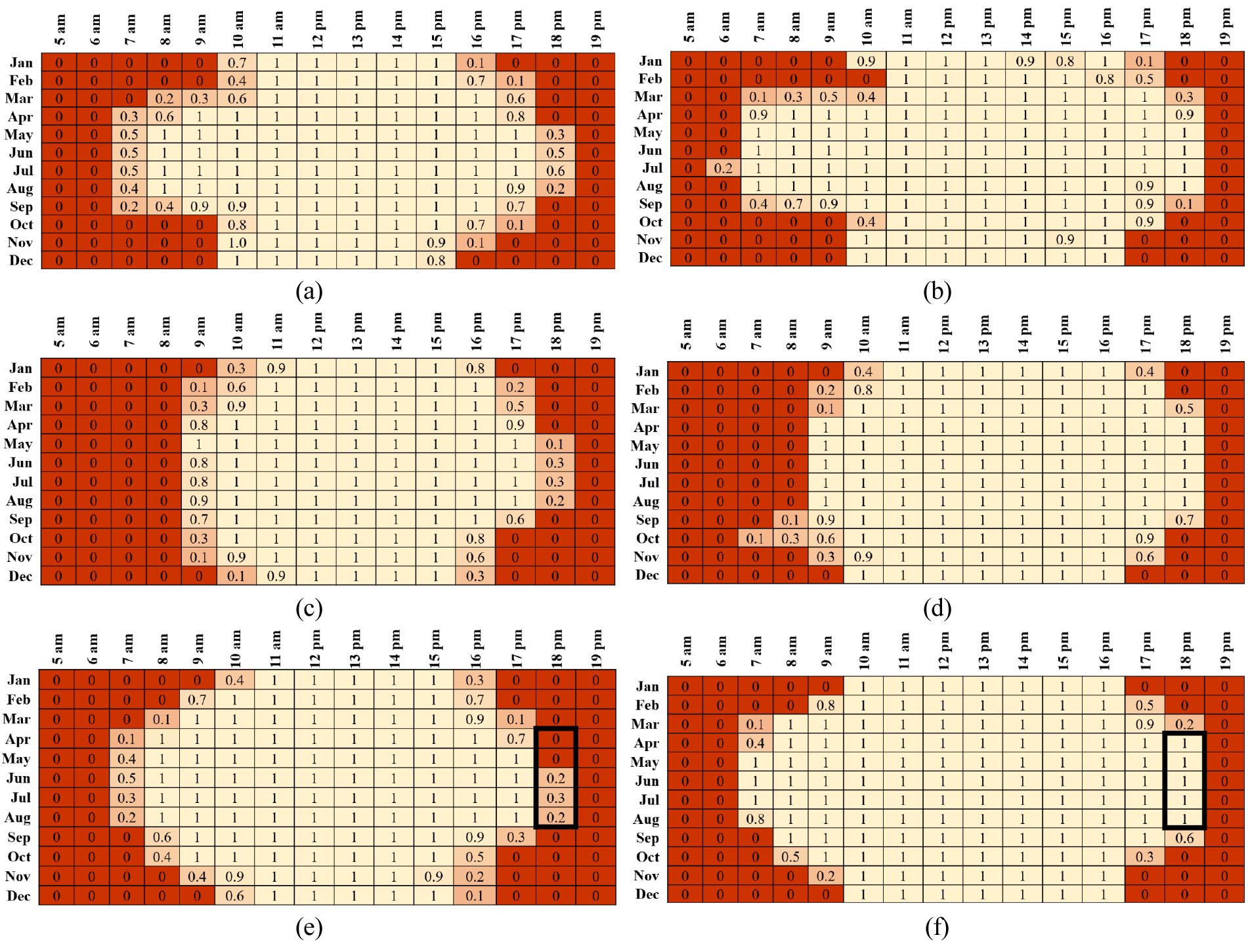
Fig. 14와 Fig. 15는 A 주차장과 B 주차장에서 Suneye 210 장비와 본 연구에서 개발한 시스템을 이용하여 조사지점의 시기별 Solar Access를 계산하고 이를 월별, 시간별로 나열하여 shading matrix 형태로 나타낸 것이다. 두 시스템으로 계산한 shading matrix는 모든 조사지점에서 대체로 유사한 패턴으로 분석되었다. 두 시스템 모두 sky 이미지 내 수광장애 영역을 같게 포착하였고 시기별 태양 경로가 일치했기 때문에 Solar Access를 유사하게 계산한 것으로 보인다. 그러나 두 shading matrix의 일부 시점에서 Solar Access의 오차가 발생하였다. 첫 번째 오차 발생 예는 A3 조사지점의 5월부터 8월까지 오전 6시의 Solar Access 값이다. 이는 Suneye 210 장비가 수광장애 영역을 자동 분류할 때 건물과 나무의 이미지 경계보다 더 많은 픽셀을 수광장애 요인으로 분류하기 때문에 발생한 오차이다. Suneye 210의 자동 이미지 처리 방식의 정확도 문제로 인해 Solar Access 값이 더 낮게 산정된 것으로 여겨진다. 반면에 본 시스템은 이미지 픽셀의 RGB 값을 정확히 판단하여 건물의 경계를 판단했기 때문에 Solar Access 값을 정확하게 산정할 수 있었다. 두 번째 오차 발생 예는 B3 주차 구역의 4월부터 8월까지 18시의 Solar Access 값이다. 이는 두 시스템의 Solar Access 계산방식의 정밀도 차이로 인해 발생한 것으로 판단된다. Suneye 210 장비의 Solar Access 계산방식은 태양 경로를 15분 간격으로 4번 추적하여 1시간 평균 Solar Access를 계산한다. 반면에 본 연구에서는 1시간 간격으로 태양 경로를 추적하여 시간 단위의 Solar Access를 계산한다. 이러한 방식을 채택한 이유는 휴대용 전자기기(스마트폰, 태블릿 PC 등)에서 빠른 속도로 Solar Access를 계산하기 위함이다. 따라서 본 시스템에서는 4월부터 8월까지 18시의 태양 위치상에 건물로 인한 그림자 영향이 존재하지 않는 것으로 판단하여 Solar Access를 100%로 높게 산정하였으나 Suneye 210 장비는 18시부터 19시 사이의 1시간 동안의 태양 경로상에 건물에 의한 그림자 영향을 고려하여 Solar Access를 0% ~ 30%로 낮게 산정하였다. 일부 시점에서 두 shading matrix 사이의 오차가 발생했으나 전반적인 shading matrix 패턴이 유사하게 분석됨에 따라 본 시스템의 Solar Access 분석 신뢰성을 검증할 수 있었다.
5.2 Solar Access와 태양광 패널 에너지 발전량 사이의 연관성 분석
본 시스템으로 계산한 Solar Access와 태양광 패널의 에너지 발전량 사이의 연관성을 분석하기 위해 B 주차장의 B1, B2, B3 조사지점에서 태양광 패널의 전력 측정 실험을 수행하고 그 결과를 Solar Access와 비교하였다. 실험을 위해 차량의 지붕에 50 W 용량의 태양광 패널 3개를 직렬로 연결하였으며(Fig. 2b), 주차면에 차량을 주차하여 태양광 패널의 최대 전력 발전 지점(maximum power point, MPP)을 측정하였다. 실험을 위해 Solmetric PV Analyzer (Solmetric, 2012)20) 장비를 이용하였다. 이 장비는 태양광 패널의 전극에 연결되어 저항 증가에 따른 전류와 전압의 변화를 측정한다. 전류와 전압을 곱하여 전력을 계산하고 최대 전력 발전 지점을 측정한다.
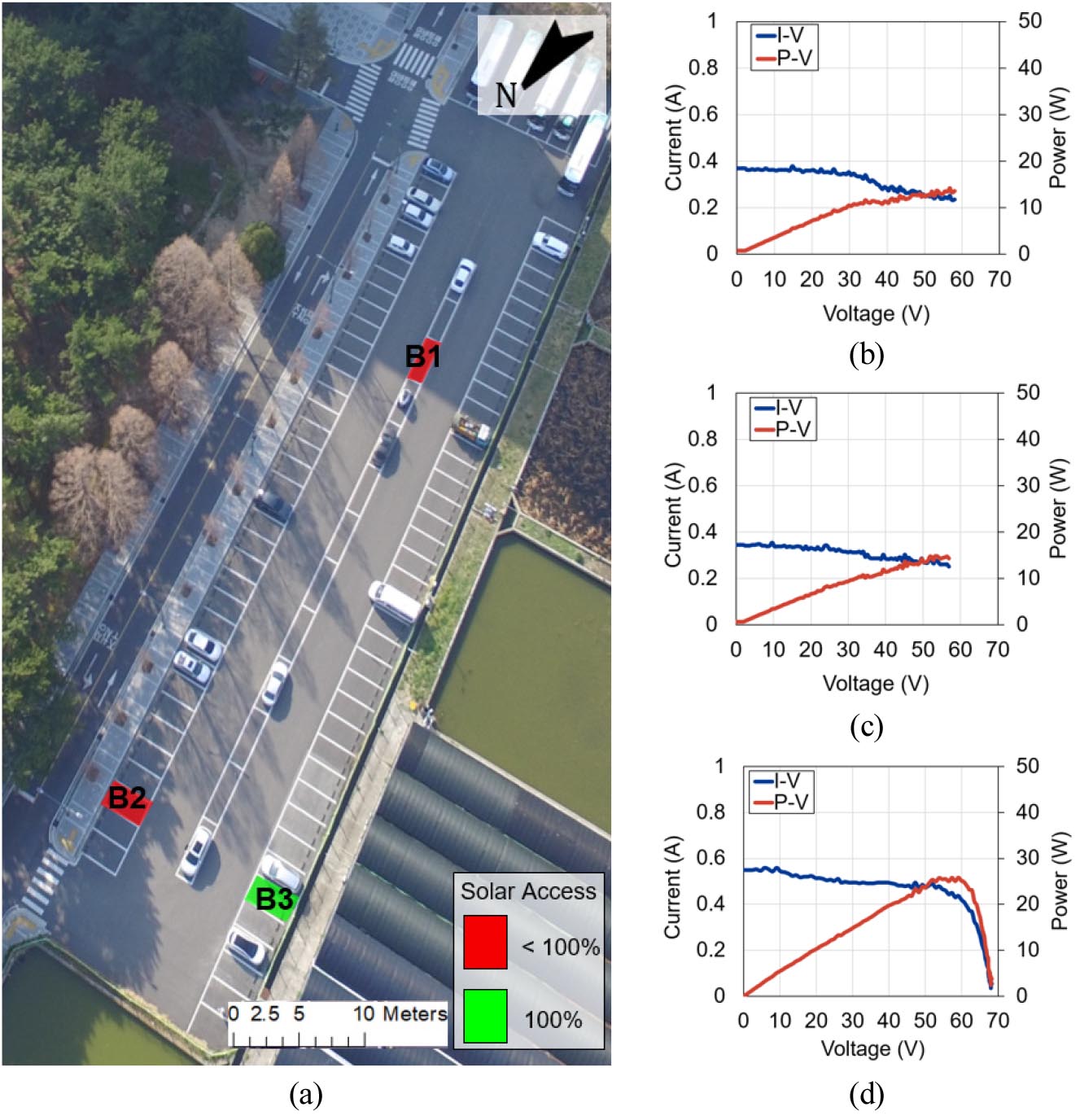
Table 3은 실험이 수행된 3월 오전 8시의 Solar Access를 나타낸다. B3 조사지점에서 100%의 가장 높은 Solar Access가 계산되었으며, B1, B2 조사지점에서는 건물과 식생에 의한 그림자 영향으로 인해 각각 30%, 0%의 낮은 Solar Access가 계산되었다. Fig. 16은 실험을 수행하는 동안 무인 항공기로 B 주차장을 촬영한 영상과 각 조사지점에서 태양광 패널의 최대 전력 발전 지점을 측정한 결과를 보여준다. Solar Access가 100%로 계산된 B3 지점에는 실제로 그림자가 발생하지 않음을 확인하였다. 반면에 Solar Access가 100% 미만으로 계산된 B1, B2 조사지점에는 실제로 그림자가 발생했음을 알 수 있다. B3 조사지점에서는 태양광 패널의 저항 증가에 따른 전류와 전압의 변화가 정상적으로 측정되어 태양광 패널의 최대 발전 전력이 25 W로 가장 높게 분석되었다. 그러나 B1, B2 조사지점에서는 그림자로 인해 태양광 패널의 전류와 전압이 비정상적으로 측정되어 최대 발전 전력이 각각 약 14 W, 14 W로 낮게 계산되었다. 전력 측정 실험을 통해 본 시스템에서 계산된 Solar Access 값이 주차면에 미치는 그림자 영향을 실제로 반영할 수 있음을 확인할 수 있었다. 또한, 같은 일사량 조건에서 Solar Access가 100%인 주차 구역과 100% 미만인 주차 구역에서 태양광 패널의 에너지 발전량 차이가 발생함을 확인하였다. 따라서 본 시스템의 Solar Access 분석 결과는 태양광 패널의 에너지 발전 패턴을 반영할 수 있는 것으로 판단된다.
6. 결 론
본 연구에서는 차량의 지붕에 설치된 보급형 360 VR 카메라를 이용하여 주차면 주위의 Sky 이미지를 촬영하고 모바일 애플리케이션을 통해 Solar Access를 계산하여 태양광 전기차의 최적 주차 구역을 분석할 수 있는 시스템을 개발하였다. 주차면 주변의 수광장애 요인을 반구형 Sky 이미지에 포착하고 이미지 픽셀의 RGB 성분 값에 따라 수광장애 영역과 하늘 영역을 구분하였다. 조사지점의 위/경도 좌표를 고려하여 시기별 태양 경로를 생성하고 Sky 이미지와 중첩하여 Solar Access를 계산하였다. 부경대학교 대연캠퍼스의 해양 공동연구관 주차장 3개 구역(A1-A3)과 양어장 주차장 3개 구역(B1-B3)을 대상으로 본 연구의 시스템을 실증하였다. 360 VR 카메라를 이용하여 Sky 이미지를 촬영하고 쏠파킹 애플리케이션으로 총 6개 구역의 Solar Access를 분석하여 3월의 오전 9시부터 오후 6시까지의 최적 주차 구역을 선정하였다. 그 결과 해양 공동연구관 주차장에서 A1 구역의 Solar Access 값이 82%로 가장 높게 나타났으며, 양어장 주차장에서 B3 구역의 Solar Access 값이 91%로 가장 높게 계산되었다. 6개 구역에서 주차 예정 시간을 6개 시간대로 달리 설정하여 월별 Solar Access를 계산함으로써 시기별 최적의 주차 구역을 선정할 수 있었다. 이를 통해 태양광 전기차 운전자가 모바일 애플리케이션으로부터 주차면과 주차 시점에 따라 달라지는 Solar Access를 직관적으로 판단하고 태양광 발전에 유리한 최적의 주차 구역을 효과적으로 결정할 수 있음을 확인하였다.
본 시스템의 Solar Access 분석 정확도를 평가하기 위하여 상용 어안렌즈 카메라 장비인 Suneye 210의 Solar Access 분석 결과와 본 연구의 결과를 비교하였다. 총 6개 구역에 대해 두 시스템으로 분석한 shading matrix가 유사한 패턴으로 분석됨을 알 수 있었다. 다만 두 시스템 사이의 Solar Access 계산방식과 Sky 이미지 내 수광장애 영역 분할 방식의 차이로 인해 일부 시점에서 Solar Access의 오차가 발생함을 확인하였다. 본 연구의 시스템에서 계산한 Solar Access와 태양광 패널의 에너지 발전량 사이의 연관성을 분석하기 위해 B1-B3 구역에서 태양광 패널의 전력 측정 실험을 수행하고 그 결과를 Solar Access 값과 비교하였다. Solar Access가 100%인 B3 구역에서 최대 전력 발전 지점 이 25 W로 가장 높게 측정되었다. 반면에 Solar Access가 각각 30%, 0%인 B1, B2 구역에서 태양광 패널에 그림자가 형성되어 최대 전력 발전 지점이 14 W로 낮게 측정되었다. 이를 통해 Solar Access가 100%인 구역과 100% 미만인 구역에서 태양광 전기차의 에너지 발전량 차이가 발생할 수 있음을 확인하였고 Solar Access가 태양광 패널의 전력 발전 양상을 반영할 수 있는 것으로 판단되었다.
본 연구의 시스템은 기존의 상용 어안렌즈 카메라 장비와 비교하여 다음과 같은 이점을 갖는다.
(1) 상용 어안렌즈 카메라는 Sky 이미지를 촬영하기 위해 사용자가 직접 방위각과 수평 각도를 세밀하게 조정할 필요가 있다. 그러나 본 연구의 시스템은 360 VR 카메라로 360° 주변 환경을 촬영하고 애플리케이션 내부적으로 방위각과 수평 각도를 고려하여 180° 반구형 Sky 이미지를 제작한다. 따라서 어안렌즈 카메라의 사용 경험이 없는 일반 운전자들도 별도의 훈련 없이 본 연구의 시스템을 통해 Sky 이미지를 촬영하고 주차면의 Solar Access를 분석하여 태양광 발전에 유리한 주차 구역을 결정할 수 있다.
(2) 상용 Solar Access 분석 장비는 일출부터 일몰까지의 연간 평균 Solar Access를 제시하기 때문에 운전자가 주차 예정 시간 동안의 Solar Access를 인지하지 못하는 한계가 있다. 반면에 본 연구의 시스템은 운전자가 주차 시작 시각과 종료 시각을 직접 설정함으로써 주차 예정 시간 동안의 Solar Access를 계산할 수 있다. 또한, Solar Access 값의 정량적 수치를 모바일 인터페이스상에 표시함으로써 운전자의 신속한 판단을 가능하게 한다.
(3) 운전자는 태양광 전기차에 유리한 주차 구역을 결정하기 위해 고가의 상용 어안렌즈 카메라와 분석 장비를 갖추지 않고 비교적 저렴한 360 VR 카메라 센서만을 차량 외관에 설치하고 쏠파킹 애플리케이션을 모바일 기기에 설치한다. 향후 태양광 전기차의 보급이 확대된다면 360 VR 카메라 센서가 차량의 외관에 미리 설치된 상태로 양산될 수 있으며 운전자는 쏠파킹 애플리케이션만 모바일 기기에 설치하여 주차면의 Solar Access를 계산하고 최적 주차 구역을 분석할 수 있을 것이다.
