

1. 서 론
2. VAV 터미널 유닛 시스템 센서 보정 방법
2.1 예측모델을 활용한 센서 보정 거리 함수
2.2 베이지안 추론 기반 센서 보정 방법
3. VAV 터미널 유닛 센서 보정 기술 검증
3.1 개요
3.2 시뮬레이션 CASE
3.3 결과 및 고찰
4. 결 론
기호 및 약어 설명
: 예측 모델을 활용한 시스템 모델 기준값
: 예측 모델 변수
: 공급 풍량 센서 거리함수
: 실내 부하 예측값
: 실내 부하 측정값
: 이산화탄소 농도 예측값
: 이산화탄소 농도 측정값
: 변수의 사후분포
: 우도함수
: 센서 기준값
: 표준편차
: 에너지소비량 비
: 비교 case 에너지 소비량
: 기준 에너지 소비량
1. 서 론
건물 설비 시스템은 다양한 시스템에 설치된 센서 및 설정값을 통하여 제어 및 운영되며, 다양한 기법들(통계 기법, 빅데이터, 머신러닝 등)을 활용하여 시스템의 성능 예측 및 제어 기술의 최적화 등에 적용되고 있다1). 이러한 기술들은 센서를 통해 측정 및 수집되는 데이터를 바탕으로 개발되며, 개발 기술들의 신뢰도를 위해 데이터의 정확성이 뒷받침되어야 한다. 그 중 VAV 터미널 유닛은 실내 쾌적(열, 공기)을 제어하기 위한 말단 시스템으로 실내 온도 센서, 공급 풍량 센서, 공급 온도 센서 등을 모니터링 센서로 이용한다. 이러한 센서들은 공조 시스템 운전 상태를 모니터링하고 컨트롤러 및 엑추에이터 등에 대한 제어 신호의 역할을 한다. 센서들은 설치 시 랜덤 오차(random error)가 발생할 수 있다. 랜덤 오차는 측정값과 평균값의 차이로 표시되며 외부적 요인에 의해 발생한다. 센서의 고장은 건물 에너지, 실내 공기질, 시스템 성능 분석 등에 부정적인 영향을 미칠 수 있으며 다수의 연구에서 센서 고장이 건물에 미치는 영향을 평가하였다. Zhang et al. (2017)2)는 건물 에너지 시뮬레이션을 활용하여 외기 온도 센서 및 온도 조절기 고장이 에너지 소비와 열 쾌적에 미치는 영향을 확인하였으며 냉방 에너지가 증가하는 것을 확인하였다. Verhelst et al. (2017)3)는 센서 및 액추에이터 고장에 따른 HVAC 성능 및 비용적 측면에 대한 영향을 분석하였다. Roth et al. (2009)4)는 상업용 건물에서 센서의 고장을 포함한 여러 결함이 에너지에 미치는 영향을 확인하였다. 이처럼 센서의 고장은 건물 에너지 성능에 큰 영향을 미치며 센서 고장에 따른 에너지 소비를 줄이고 실내 쾌적을 향상시키기 위해서는 센서의 보정이 필요하다. 본 연구에서는 베이지안 추론 및 실내 예측모델을 활용하여 VAV 터미널 유닛의 풍량 센서 보정 방법을 제안 및 검증하였다.
2. VAV 터미널 유닛 시스템 센서 보정 방법
2.1 예측모델을 활용한 센서 보정 거리 함수
실제 운영 시스템에서 센서 보정을 위해 거리 함수와 시스템 모델 및 센서 기준 값들은 수학적 관계를 가져야한다. 시스템 모델은 에너지 또는 열 평형, 질량 보존과 같은 수학 및 물리적 이론을 바탕으로 모델화 될 수 있다. 그러나 시스템 모델 구축에 있어 필요한 모든 요소를 측정할 수 있는 센서가 현장의 시스템에 설치되지 않기 때문에 시스템 모델을 산정하는 것은 매우 어렵다. 이를 위해 센서 보정에 활용될 수 있는 시스템 모델은 예측 모델을 이용하여 정의할 수 있다. 본 연구에서는 데이터 기반 예측 모델(식(1))5)을 시스템 모델 기준 값으로 사용하였다.
식(1)를 이용하여 데이터 기반 예측 모델을 이용한 센서 보정 거리 함수를 구성하였으며, 식(2)는 부하 예측 모델, 이산화탄소 농도 예측 모델을 기반으로 공급 풍량 센서의 거리 함수를 나타내며, 공급 풍량이 영향을 미치는 부하와 이산화탄소 농도를 모두 고려한 거리 함수를 구성5)하였다.
2.2 베이지안 추론 기반 센서 보정 방법
센서 보정은 센서와 알려지지 않은 매개변수(실내 부하 또는 이산화탄소 농도)의 값에 대한 확률 분포로 표현될 수 있기 때문에 제안된 보정 문제를 해결하기 위해서는 통계적 접근법이 적절하다6). 이때 베이지안 추론은 보정 문제의 거리 함수를 최소화하기 위해 오프셋 상수와 알려지지 않은 매개 변수를 통계적으로 유도하는데 사용된다.
Bayes 정리(식(3))에 의하면 베이지안 추론은 우도 함수와 변수 ‘x’에 대한 사전 분포를 기반으로 변수 ‘x’에 대한 사후 분포를 도출한다. 우도 함수는 평균이 ‘0’인 가우스 분포를 사용하는 조건부 확률 분포를 기반으로 한다. 본 연구에서는 식(2)의 거리 함수를 식(4)의 가우스 분포에 적용하여 거리 함수가 최소화될 가능성을 높일 수 있다. 따라서 거리 함수 값이 작아질수록 사후 분포의 확률은 높아질 수 있으며 사전 분포는 확률분포 또는 동일한 확률의 범위로 정의할 수 있다.
베이지안 추론에서 식(3)과 같이 정규화 상수를 계산하는 것은 어렵다. 본 연구에서는 적분을 계산하지 않고, 사후 분포를 도출하기 위해 MCMC (Markov Chain Monte Carlo) 방법을 사용하였다. 또한 MCMC 방법을 사용하기 위해 공동 다변량 분포에서 무작위 샘플 시퀀스를 얻는데 사용되는 샘플링 기법인 Metropolis-Hastings 알고리즘7)을 사용했다. MCMC 알고리즘은 1,000 ~ 10,000번의 반복(iteration) 시행 횟수를 요구하며7), 본 연구에서는 4,000회로 선정하였다. 4,000회의 반복 횟수 중에서 최초 10%는 초기값의 영향을 받을 수 있으며, 이를 없애기 위해 최초 10% 추정결과(400회)는 삭제하는 Burn-in 과정을 진행하였다.
3. VAV 터미널 유닛 센서 보정 기술 검증
3.1 개요
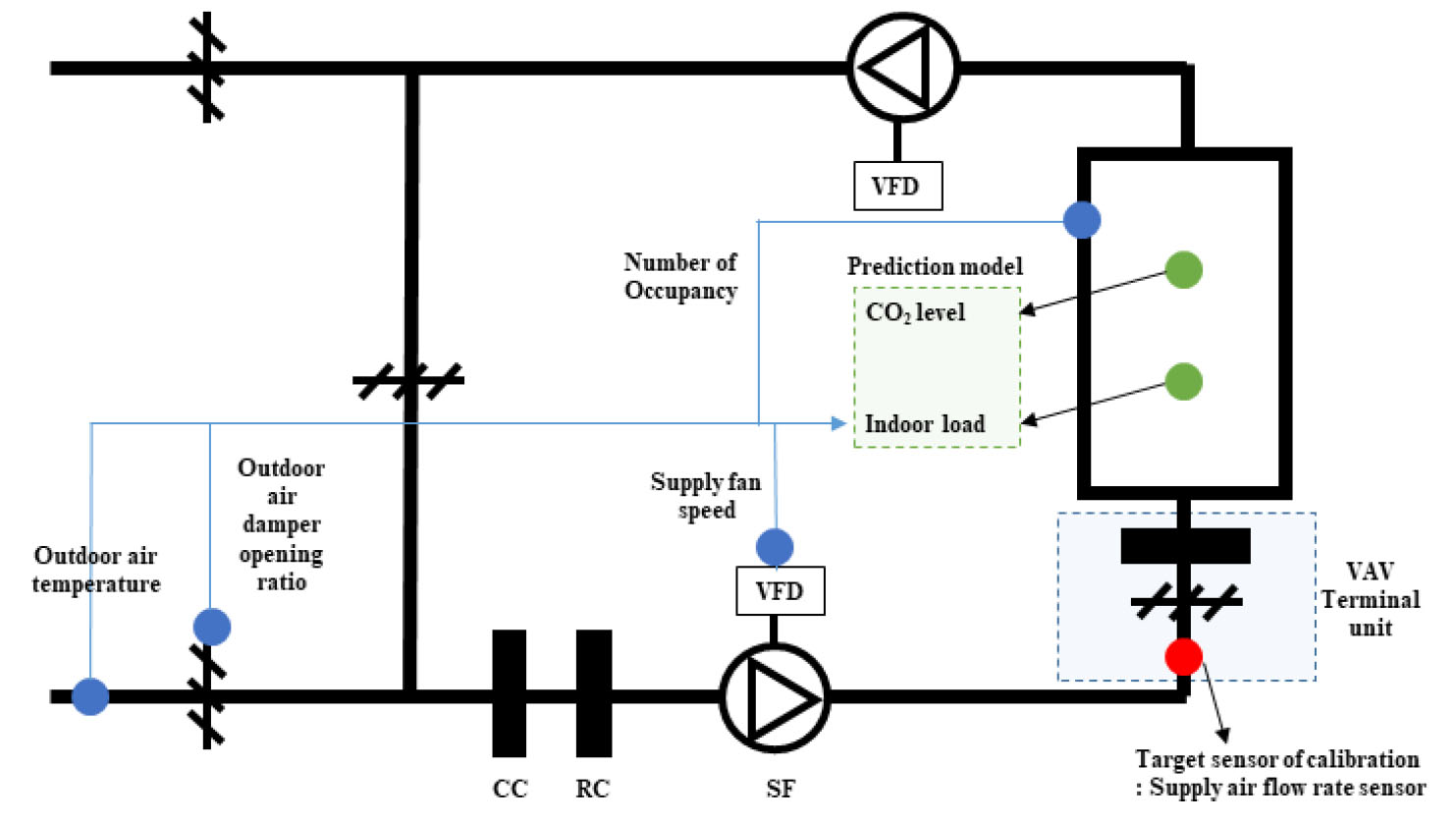
대상 공간은 실험실로서, 약 116.64 m2 면적이며 단일 덕트 VAV 시스템과 재열 코일이 적용된 터미널 유닛이 설치되어 있다. VAV 터미널 유닛은 실내 온도 값을 측정하여 실내 설정 온도를 유지할 수 있도록 풍량을 공급하기 위하여 댐퍼를 제어한다. 공급풍량은 센서의 성능에 따라 실내 열환경 및 공기환경에 영향을 미치는 중요한 요소이다. Fig. 1은 대상공간의 VAV 터미널 유닛 개략도를 나타내며, 데이터는 BAS (Building Automation System)를 통해 수집되고 있으며, 센서 보정 방법을 개발 및 검증하기 위하여 외기온, 외기댐퍼 개도율, 공급팬 스피드 및 공급 풍량을 수집하였다.
3.2 시뮬레이션 CASE
본 장에서 개발된 VAV 터미널 유닛 센서 보정 방법을 검증하기 위하여 VAV 터미널 유닛의 센서 오차를 발생시킨 시뮬레이션을 통한 센서 보정 기술 결과를 확인하였다. VAV 터미널 유닛 시스템의 모니터링 및 제어에 활용되는 공급 풍량 센서에 대하여 오프셋 오차를 발생시켜 CASE를 구성하였으며, Table 1과 같다. CASE 분석을 위하여 시뮬레이션 툴인 TRNSYS17 과 R Studio를 이용하여 센서 보정을 실시하였다. 센서 오차 데이터의 경우 TRNSYS17에서 각각의 센서에 임의 오차를 발생시켜 데이터를 수집하였으며, 이를 바탕으로 각각의 부하, 이산화탄소 농도 예측 모델 및 거리 함수를 구축하고, R Studio의 베이지안 MCMC 알고리즘을 이용하여 오차 분석 및 보정 결과를 도출하였다.
Table 1.
Sensor error CASE
| CASE | CASE1 | CASE2 | CASE3 | CASE4 |
| Offset error | -100 CMH | -50 CMH | +50 CMH | +100 CMH |
Table 2.
Prior distribuition of airflow rate sensor
| Sensor | Prior distribution | |
| Mean | Stadard Deviation | |
| Airflow rate sensor | 0.0 | 8.64 |
공급 풍량 센서 거리 함수 식(2)은 우도 함수에 적용되었으며, Table 2와 같이 보정 전에 센서의 오류를 알 수 없기 때문에 평균은 ‘0’으로 설정되었으며, 표준 편차는 센서의 정밀도를 기반으로 선정하였다8).
3.3 결과 및 고찰
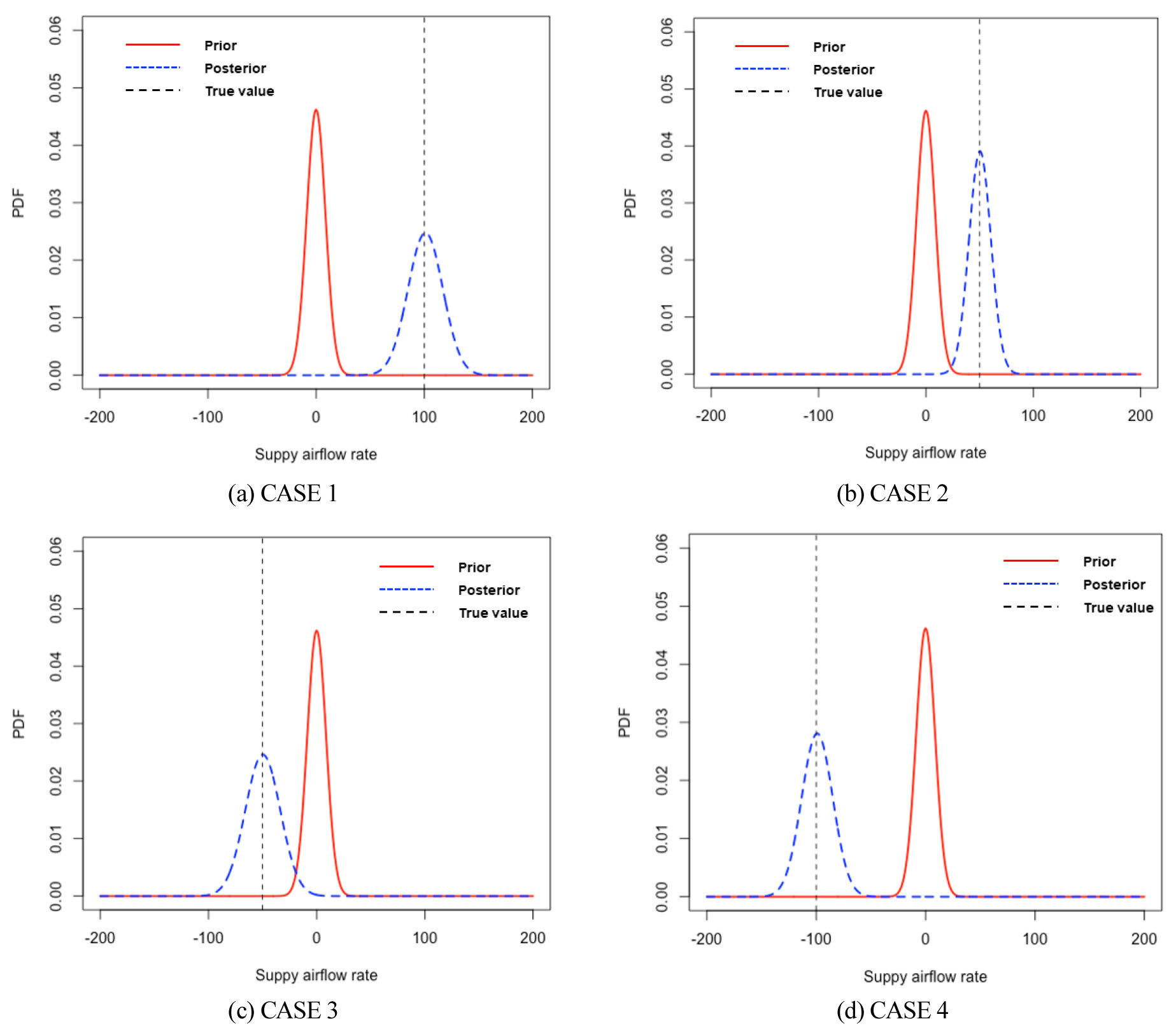
Fig. 2는 공급 풍량 센서의 사전, 사후 분포를 확률 밀도 함수 그래프로 나타낸 것이다. 각각의 시뮬레이션 CASE의 경우 모든 시뮬레이션 CASE에서 발생된 임의의 오차를 사후 분포로서 도출하였으며, VAV 터미널 유닛 센서의 보정 결과를 도출하였다. CASE 1은 풍량센서의 –100 CMH의 오차가 발생한 경우이며, 사후 분포 예측 결과 +101.1 CMH의 보정 결과를 나타내었다. CASE 2, 3, 4의 경우 –50 CMH, +50 CMH, +100 CMH의 오차를 풍량센서에 발생한 경우이며, +50.3 CMH, -49.8 CMH, -99.1 CMH의 보정 결과를 도출하였다. 이러한 결과를 통해 예측 모델을 이용한 VAV 터미널유닛 시스템의 센서 보정 방법 적용 및 검증을 통해 센서에서 발생하는 오차를 보정할 수 있음을 확인하였다.
Fig. 3은 센서 오차 CASE에 따른 실내 불쾌적을 분석한 것이다. 터미널 유닛의 공급 풍량 센서의 오차 발생에 따라 난방 운영 시에서는 실제 풍량 대비 높게 감지 및 지시하게 되는 경우에 실내 온도를 만족시키지 못하는 구간이 발생한다. +100 CMH의 오차가 발생 시 연중 약 78시간의 불쾌적 구간이 발생하며, +50 CMH의 오차 발생 시 41시간의 불쾌적 구간이 발생하였다. 이는 설정된 최소 풍량 값이 실제 보다 높게 감지됨에 따라 공급 풍량이 감소하기 때문이다. 냉방 운영 시, 실제 풍량 보다 낮게 감지가 될 경우 설정된 풍량에 도달하기 위하여 풍량이 최대 풍량 이상으로 공급되는 구간이 발생하고 이에 따라 실내가 과냉되어 불쾌적 구간이 발생한다. -100 CMH의 오차 발생 시 961시간, -50 CMH 오차 발생 시 484시간의 불쾌적 구간이 발생하였다. 이는 실내 과냉 구간에서 재열 코일 작동으로 인해 불필요한 재열 코일 에너지가 낭비되는 시간이 발생하였다.

에너지 소비량의 비교는 센서 오차가 발생하지 않은 기존(BASE) 대비 센서 오차 발생 시 소비되는 에너지 소비량의 비를 분석하였으며, 식(5)를 통해 평가하였다.
재열 코일 에너지의 경우 Fig. 4와 같이 실제 풍량 보다 낮게 감지되는 경우, 오차 미 발생 시보다 최대 1.3배 재열 코일에너지가 소비되는 것을 확인 할 수 있다. 설정 풍량 도달을 위해 많은 풍량이 공급되어 난방에 사용되었고 이에따라 재열 코일 에너지가 추가적으로 발생된다. 공급 팬 에너지 분석 결과 오차 미 발생 시 대비 풍량이 낮게 감지될 경우 최대 1.7배의 에너지가 소비되는 것을 확인하였다. 실제 풍량 보다 높게 감지되는 오차가 발생 할 경우, 오차 미 발생 시보다 팬 에너지 및 재열 에너지가 작게 소비되지만 난방 기간 실내 설정온도를 도달하지 못하는 경우의 발생으로 인해 쾌적의 문제가 발생하여 에너지 절감에 대한 유의미한 결과를 나타내지 않는다.

4. 결 론
VAV 터미널 유닛 시스템은 센서의 정확도에 따라 시스템의 제어 성능이 달라지게 된다. 본 연구에서는 VAV 터미널 유닛 시스템의 실내 환경 예측 모델 및 베이지안 추론을 활용한 센서 보정 방법을 제시하였으며, 시뮬레이션을 이용하여 개발된 센서 보정 방법을 검증하였다. VAV 터미널 유닛 센서 보정을 위하여 실내 부하 및 이산화탄소 농도 예측 모델을 이용하여 공급 풍량 센서 오차에 대하여 거리함수를 구성하고, 베이지안 MCMC 방법을 활용하여 각 센서의 보정 상수를 도출하는 방법을 개발하였다. 또한 센서 오차 CASE를 구성하였고, 이를 센서 보정 방법을 이용하여 검증하였다. 모든 CASE에서 발생 오차를 보정할 수 있음을 확인하였으며, VAV 터미널 유닛의 모니터링에 활용되는 공급 풍량 센서 오차에 따른 영향을 분석하였다. 센서 오차에 따라 실내 설정 온도 미도달 또는 과냉, 과열 등의 문제가 발생하였고, 팬 및 재열 코일 에너지가 추가적으로 사용되어 VAV 터미널 유닛 센서 오차 발생에 따른 실내 불쾌적 발생 및 에너지 낭비를 확인하였다. 향후 연구에서는 실제 자동제어 시스템에 센서 보정 방법론의 적용을 통해 실증 연구를 진행할 예정이다.
