

기호설명
A :로터 회전 단면적(m2)
J :관성 모멘트(kg·m2)
L :각 운동량(kg·m2 ·rad/s)
N :동력 전달 축 기어 비(-)
P :풍력터빈 출력(W)
R :로터 회전 반지름(m)
:출력 계수(-)
:발전기 관성모멘트(kg·m2)
:허브 관성모멘트(kg·m2)
:로터 관성모멘트(kg·m2)
J _{shaft} :회전축 관성모멘트(kg·m2)
:전체 관성모멘트(kg·m2)
:자이로 모멘트(Nm)
:허브 좌표계 y방향 모멘트(Nm)
:허브 좌표계 z방향 모멘트(Nm)
M _{ZB1,2,3} :1, 2, 3번 블레이드 루트 좌표계 z방향 모멘트(Nm)
P _{0} :특정 작동지점에서의 풍력터빈 출력(W)
m :회전 관성 질량(kg)
r :회전 관성 반지름(m)
t :시간(s)
v :풍속(m/s)
:특정 작동 지점에서의 풍속(m/s)
:시동 풍속(m/s)
그리스 문자
: 알짜 토크[Nm]
: 회전속도[deg/s]
: 특정 작동 지점에서의 회전속도[deg/s]
: 공기 밀도[kg/mm3]
: 특정 작동 지점에서의 피치 각도[deg]
: 요 오차[deg]
: 1, 2, 3번 블레이드의 방위각[deg]
: 요 운동속도[deg/s]
1. 서 론
풍력터빈의 제어는 풍력터빈이 풍속이나 풍향 변화 등의 환경변화에 적절히 대응하면서, 자동운전이 가능하도록 구현된다. 풍속이 정격풍속보다 낮은 구간에서는 풍력터빈이 최대 출력을 얻어내기 위한 전략이 적용되며, 이를 위해 제어기는 풍력터빈에 피치 각 지령과 발전기 토크지령을 내려, 블레이드의 피치 각을 우수 피치 각으로 유지하고 발전기 토크는 발전기 회전속도에 따라서 최대 출력 지점을 추종하도록 한다. 또한 풍속이 정격 풍속보다 높은 구간에서는 풍력터빈의 출력을 정격출력으로 일정하게 유지하기 위한 전략이 적용되며, 이를 위해 제어기는 역시 풍력터빈에 피치 각 지령과 발전기 토크지령을 내려, 발전기 토크를 정격 토크로 유지하고 블레이드 피치 각도를 제어하여 풍력터빈의 정격 회전속도를 유지하도록 한다1,2).
풍향이 변화하여, 풍향과 풍력터빈 방향과의 각도차이 즉 요 오차가 크게 발생하는 경우는 풍력터빈 출력 손실이 크게 발생하고, 풍력터빈 하중이 증가하기 때문에, 적절히 요 제어가 수행된다. 풍력터빈의 요 제어는 풍향계와 요 방향각 정보를 기반으로 계산 된 요 오차를 입력받아 설계자에 의해 설정된 요 오차 허용범위를 벗어나는 경우 요 엑츄에이터에 지령을 내려, 나셀을 회전시키는 전략으로 설계된다. 하지만 풍력터빈의 빈번한 요 운동은 요 시스템의 수명 감소 및 고장을 일으킬 수 있기 때문에, 요 사용량을 줄이면서 풍향을 추종할 수 있는 알고리즘이 필요하다3,4).
다수의 풍력터빈으로 건설되는 풍력발전단지는 이와 같은 개별 풍력터빈의 자동운전 제어알고리즘에 기반하여, 개별 풍력터빈이 자율적으로 발전을 하게 되고, 이로 인해 단지 전체의 발전량이 결정되도록 운영되어왔다. 하지만 최근 풍력발전단지의 후류 손실이 크게 발생하는 경우5), 상위 풍력발전단지 제어기를 적용하여 개별 풍력터빈에 적절한 출력지령이나 요 지령을 할당함으로써 후류손실을 저감하여 단지 전체의 발전량을 향상시키는 기술들이 연구되고 있다6,7,8,9,10,11).
이러한 풍력단지 제어알고리즘이 실제 풍력발전단지에 적용되기 위해서 개별 풍력터빈의 제어기는 풍력발전단지 제어기로부터 전달되는 출력지령과 요 지령을 추종할 수 있어야 하며, 단지 제어기로부터의 별도의 지령이 없는 경우 자체적인 출력제어 및 요 제어 전략에 따라 자동운전이 가능하도록 운영적인 측면이 고려되어 설계되어야 한다. 출력지령에 대한 풍력터빈의 추종제어 알고리즘은 문헌상에 다양한 방법들이 제안되고 있으며, 실제 중형 또는 대형 풍력터빈에 적용하여 실증한 연구결과들이 문헌에 제시되고 있다12,13,14). 하지만, 요 지령에 대한 풍력터빈의 추종제어 알고리즘은 상대적으로 연구결과가 거의 문헌에 제시되지 않고 있는 상황이다.
따라서 본 연구에서는 요 지령을 이용한 단지 제어를 수행하기 위한 기초 연구로서, 풍력터빈 제어기가 풍력단지 제어기로부터의 요 지령을 추종할 수 있도록 풍력터빈 요 제어 알고리즘을 설계하고 시뮬레이션을 통하여 요 지령 추종 성능을 검증하고자 하였다. 또한 풍력단지 제어기로부터 요 지령이 더 이상 할당되지 않는 경우 원래의 자동운전 요 제어 알고리즘이 적용될 수 있도록 제어알고리즘을 개선하고자 하였다.
이를 위해 미국국립재생에너지연구소에서 제시한 NREL 5MW 풍력터빈15)을 대상으로 요 제어 알고리즘을 설계하였다. MATLAB/Simulink 프로그램을 이용하여 설계된 제어기는 최종적으로 시뮬레이션이 수행되는 Bladed 프로그램에서 외부 제어기로 적용하기 위해 C++코드 기반 DLL (Dynamic Linking Library)파일로 변환되어 적용되었다. 적절한 요 운동속도를 선정하기 위해 난류 성분이 없는 바람의 시뮬레이션으로 요 운동속도에 따른 자이로 모멘트의 발생을 확인하였다. 또한 요 제어 알고리즘에 요 지령을 추종하기 위한 알고리즘을 추가하여 정상작동 중에 요 지령이 들어오는 경우를 난류 성분 및 풍향 변화가 있는 동적 시뮬레이션을 통하여 모사하고 제어 알고리즘의 성능을 확인하였다.
2. 자이로 효과
요 제어를 수행하기 위해 대형 풍력터빈의 나셀 전체를 회전시키려면 로터를 포함하는 나셀의 전체 자중에 의해 발생하는 회전 관성의 영향을 고려하여야 하며, 이러한 영향은 풍력터빈의 자이로 효과로 알려져 있다16).
Fig. 1은 풍력터빈에 발생하는 자이로 효과를 보여준다. Fig. 1(a)은 타워 상부 좌표계에서 요 운동을 나타내며 Fig. 1(b)은 Fig. 1(a)에서 나타나는 각 운동량 및 자이로 모멘트의 벡터 관계를 보여준다. 식(1)은 Fig. 1(a)의 원점에서 회전 시스템에 대한 뉴턴 운동방정식을 나타낸다1). 식(2)은 식(1)의 각 운동량을 나타내며 관성모멘트 및 회전속도로 표현된다1). 자이로 모멘트는 식(1)과 같이 시스템에 발생된 각 운동량을 시간에 대하여 미분한 형태로 나타나므로 Fig. 1(b)의 관계에 의해 로터가 x축에 대하여 회전하고 있을 때 z축에 대하여 속도의 회전 운동을 시키면 y축 방향으로 자이로 모멘트 가 발생하게 된다. 반대로 로터가 x축에 대하여 회전하고 있을 때 y축에 대하여 회전 토크 을 가하면 나셀은 z축 방향으로 의 속도로 회전하게 된다. 이 때 자이로 모멘트의 방향은 로터 회전축의 접선방향이므로 벡터의 외적 관계에 의해 요 운동속도와 비례하여 크기가 증가하는 것을 알 수 있다. 즉, 풍력터빈이 회전하는 동안에 요 운동을 하게 되면 자이로 모멘트에 해당되는 타워 상부 틸팅 모멘트가 발생되고 반대로 풍력터빈이 회전하는 동안에 타워의 전후방향 모멘트를 발생시키면 타워 상부 요 모멘트를 발생시키게 된다.
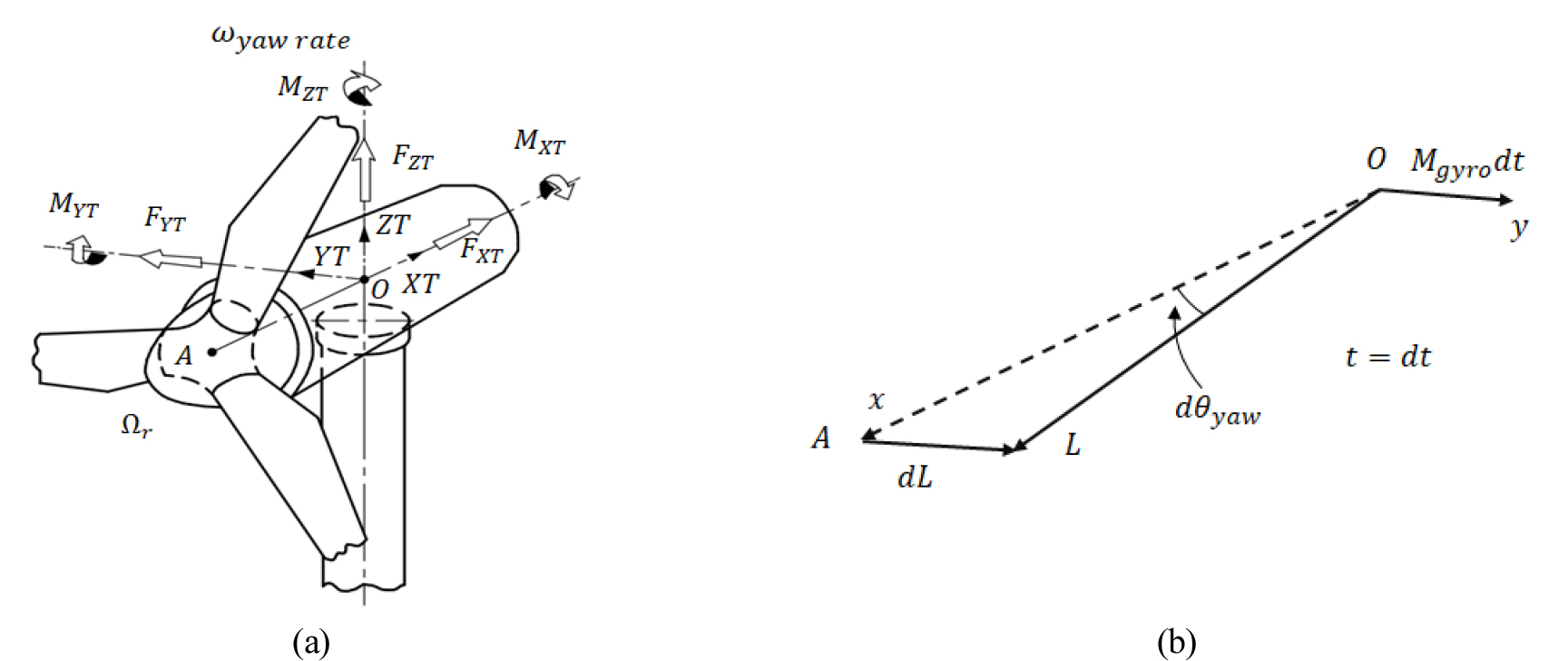
식(3)은 이러한 자이로 모멘트를 식(1), (2)의 관계를 이용하여 나타낸 것이며, 식(4)은 식(3)에 대입되는 풍력터빈의 로터, 발전기, 허브, 메인 샤프트가 모두 포함된 관성모멘트를 나타낸다1).
Fig. 2는 요 운동속도에 따른 시뮬레이션 결과 중 출력과 관련된 풍력터빈의 상태들을 보여준다.
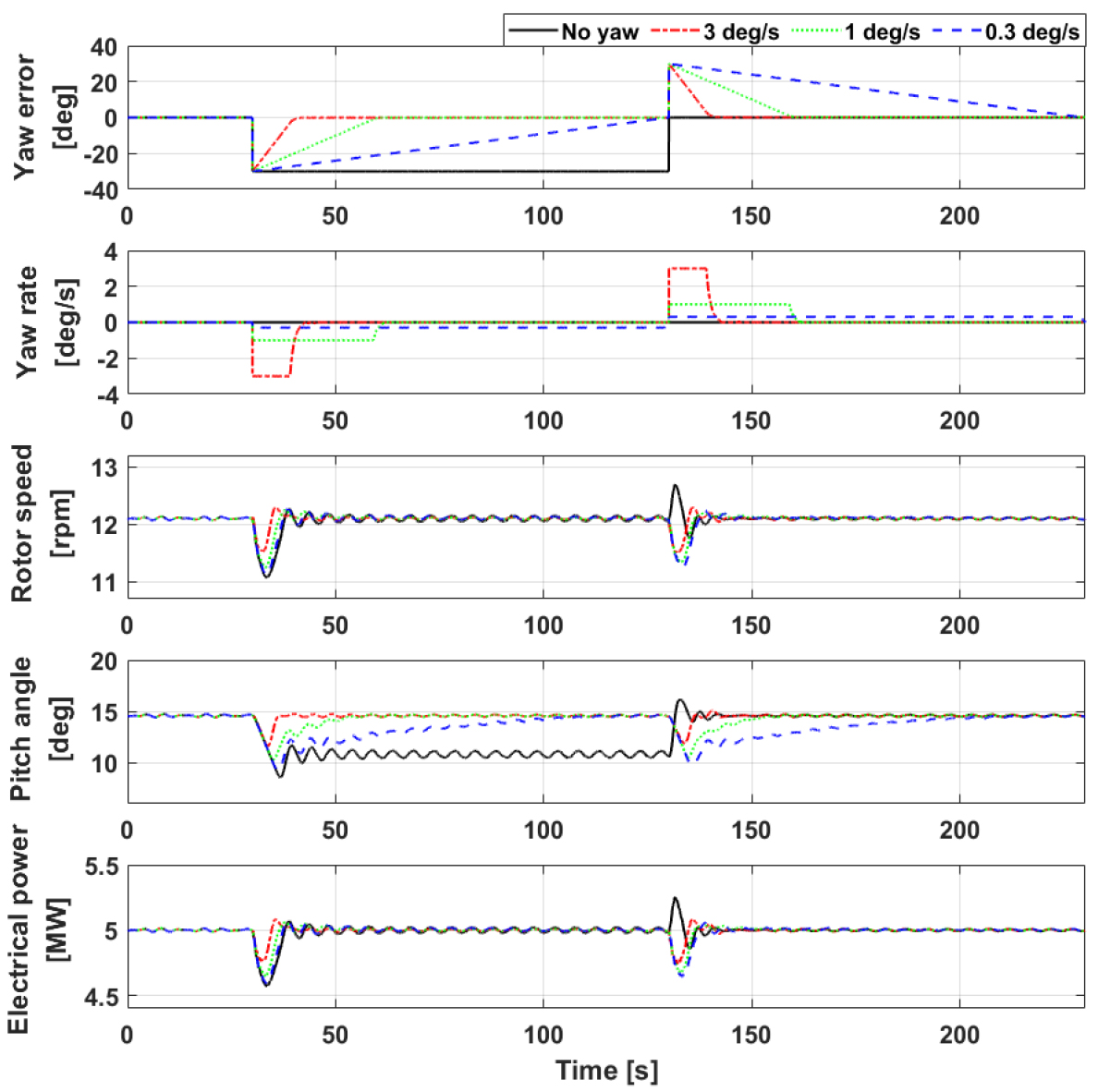
18 m/s의 난류 성분이 없는 바람에 대하여 두 번의 풍향 변화가 있는 조건으로 약 230초간 시뮬레이션 되었으며, 요 오차, 요 운동속도, 로터 회전속도, 피치 각, 출력을 나타내었다. 요 제어를 하지 않는 경우 감소된 풍속으로 회전속도를 회복하기 위해 피치 각을 적게 사용하는 것을 알 수 있다. 또한 요 운동속도가 0 deg/s에서 3 deg/s로 점점 커질수록 Fig. 2의 요 오차가 0에 가까워지는 것으로 보아, 요 운동속도가 빠를수록 요 오차를 빠르게 줄일 수 있는 것을 알 수 있다. 하지만 단지 풍향 추종 성능만을 위해서 요 운동속도를 빠르게 할 수는 없다는 것을 Fig. 3에 제시된 풍력터빈 블레이드, 타워, 허브에서의 모멘트 변화를 통해 알 수 있다.
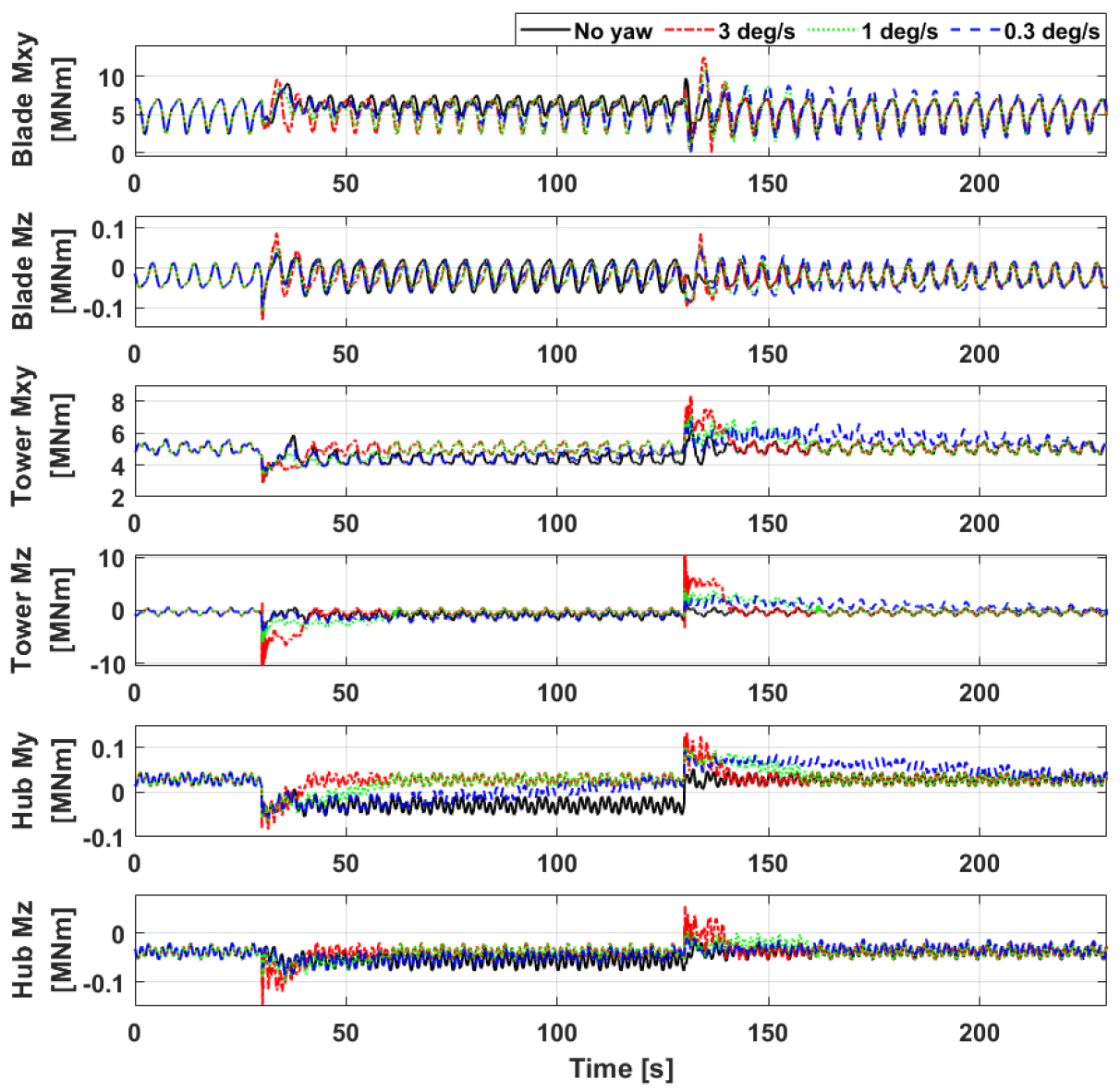
Fig. 3은 요 운동속도에 따른 시뮬레이션 결과 중 기계적 하중과 관련된 상태들을 보여준다. Fig. 2와 같은 시뮬레이션이며, 블레이드 루트 부에서의 xy, z 방향 모멘트, 타워 상부에서의 xy, z 방향 모멘트, 허브에서 y, z 방향 모멘트를 나타내었다. Fig. 1(a)을 통하여 요 운동속도가 타워 하중에 영향을 줄 수 있는 것을 설명하였는데, 좌표계 중심이 Fig. 1(a)의 O점이 아니라 A점에 해당하는 허브 좌표계를 기준으로 바라보면 타워와 마찬가지로 회전하는 각각의 블레이드에도 Fig. 1(b)의 자이로 효과가 발생하게 된다. 이 때, 블레이드가 받게 되는 자이로 효과가 타워의 경우와의 다른 점은 식(5)과 같이 블레이드 회전좌표계와 허브 고정좌표계 간에는 세 블레이드의 회전 방위각에 의한 변환 관계가 존재한다는 점이다1). 결과적으로, 요 운동속도는 고정되어 있는 타워뿐만 아니라 회전하는 블레이드의 기계적 하중에도 영향을 미치게 된다.
Fig. 3의 30초 부근 및 130초 부근에서 알 수 있듯이, 요 운동속도에 비례하여 모든 하중이 증가된 것을 알 수 있다. 이러한 자이로 효과로 인해 단순하게 요 오차를 줄이는 목적으로 요 운동속도를 크게 가져갈 수는 없으며, 적절히 요 운동속도가 제한되어야 하는 것을 알 수 있다. Fig. 3에서 요 운동속도가 약 0.3°/s와 같이 아주 작은 값으로 요 운동을 수행하는 경우, 하중 증가 현상이 감소되는 것을 알 수 있으며 이에 따라 본 연구에서 요 제어에 의한 운동속도를 0.3°/s 으로 제한하였다.
3. 제어 알고리즘
본 연구에서 블레이드 피치 각과 발전기 토크의 제어는 기본 피치 PI 및 토크 스케줄에 의한 기본 제어 알고리즘이 적용되었으며1), 현장 시험을 통해 선행 연구된 요 제어기4)에 단지 요 지령을 추종하기 위한 알고리즘이 추가적으로 설계되었다. 선행 연구4)에서 요 제어 알고리즘은 요 운동 횟수 측면에서 MAF (Moving Average Filter) 방식보다 NREL 방식의 성능이 더 우수한 것으로 제시되었다. 하지만 본 연구에서는 풍력단지 요 지령 추종제어의 성능을 확인하기 위해 상대적으로 짧은 시간에 대하여 시뮬레이션을 수행해야하므로 자동 요 제어 알고리즘은 MAF 방식 기반으로 설계되었다.
회전하는 풍력터빈 로터가 만드는 회전면적 A를 수직으로 통과하는 바람이 갖는 단위 시간당의 에너지는 식(6)과 같이 나타낼 수 있다1). 블레이드의 공력 성능에 의해 결정되는 출력 계수와 나셀 요 오차에 의해 발생하는 풍속의 감소를 고려하게 되면 풍력터빈의 출력파워는 식(7)과 같이 나타낼 수 있다1). 식(7)의 출력계수 는 특정 작동점에 대하여 블레이드 성능에 따라 비선형함수로 주어진다. 또한 풍향변화에 의해 발생하는 요 오차를 고려한다면 풍력터빈에 작용하는 풍속은 코사인 성분으로 분해되어 이론적으로 식(7)과 같이의 출력 감소가 발생하는 것을 알 수 있으며, 실험적으로는 약 의 출력 감소가 발생하는 것으로 확인되었다3).
따라서 풍력터빈의 요 오차로 발생하는 출력손실을 감소시키기 위해서는 피치 각과 토크의 제어 알고리즘뿐만 아니라 해당 알고리즘이 유효하게 작용할 수 있도록 요 오차를 줄일 수 있는 요 제어 알고리즘이 설계 되어야 한다.
Fig. 4는 전체적인 요 제어 알고리즘의 예시를 보여주며, MATLAB/Simulink에서 제공하는 블록을 이용하여 설계되었다. 본 연구에서 설계된 요 제어 알고리즘은 기능에 따라서 크게 두 부분으로 나누어 나타낼 수 있다. Fig. 4(a)는 풍력터빈의 전반적인 요 제어 블록선도를 나타내며, Fig. 4(b)는 실제 요 액츄에이터로 입력되는 요 지령을 계산하는 부분으로서 정상 작동 중에 다양한 요 운영 모드에 대응하여 요 지령의 계산을 수행한다. 이러한 Fig. 4의 요 제어 알고리즘을 구체적으로 설명하기 위하여, 그림을 확대하여 Fig. 5, Fig. 6 그리고 Fig. 7에 나타내었다.
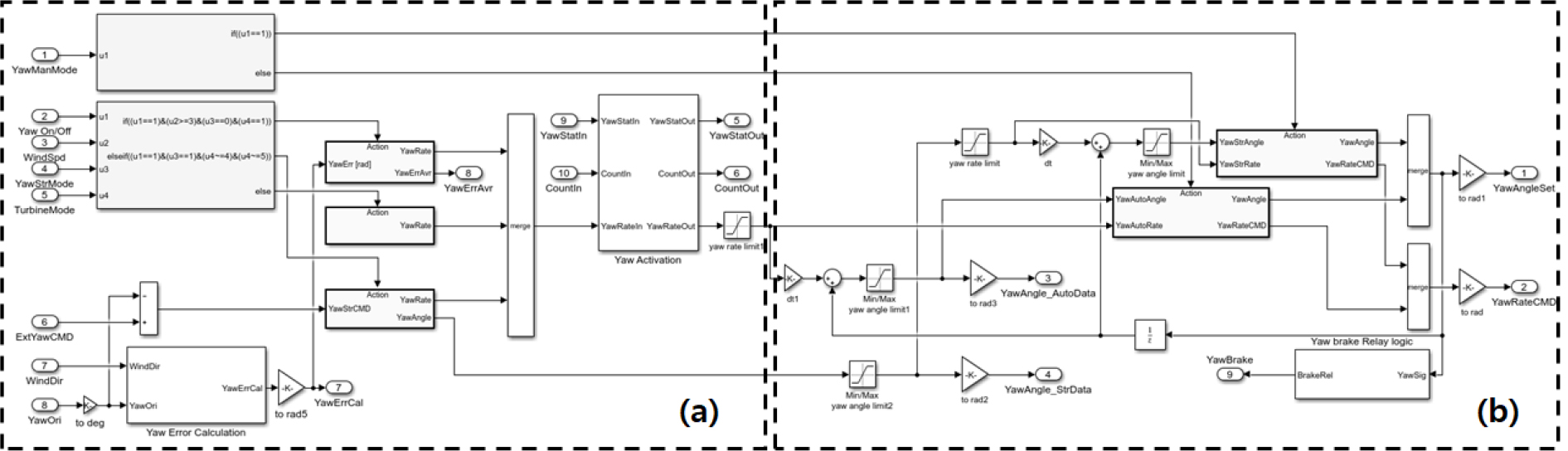
Fig. 5는 Fig. 4(a)를 확대하여, 요 운영 모드의 순서도와 함께 나타낸 그림이다. Fig. 5(a)는 풍력터빈 요 제어 모드를 결정하기 위한 순서도를 나타내며, 풍력터빈의 운영제어의 측면에서 풍력터빈의 점검 및 초기화 모드 이 후 요 시스템에 대한 운영은 독립적으로 진행된다. 본 연구에서 고려된 요 운영 모드는 수동 모드, 단지 요 지령 모드, 자동 모드로 나뉜다. 수동 모드는 풍력터빈 운영자에 의해 SCADA (Supervisory Control And Data Acquisition)를 기반으로 실시간 모니터링을 수행중인 상황에서 유지보수, 점검 등의 이유로 직접 요 운동을 조작하는 모드이다. 단지 요 지령 모드는 단지 제어기의 요 지령에 의해 풍력터빈이 특정 방향으로 조향되는 모드이며, 단지 요 지령 각도와 요 지령 모드의 on / off 상태를 입력받아 요 지령에 대한 추종제어가 수행된다. 또한, 자동 모드는 자체적으로 요 오차를 줄이기 위한 요 운동이 수행되는 모드이다. 이 때 요 수동 모드와 요 지령 모드가 사용되지 않으면서 풍속이 시동 풍속 보다 작은 경우에는 풍력터빈이 전력을 생산할 수 없기 때문에 요 운동을 수행할 필요가 없게 된다. 따라서 요 자동 모드에서는 나셀 풍속계에서 측정된 풍속이 시동 풍속보다 커야하는 조건이 추가된다. 매 제어 샘플링 시간마다 순차적으로 요 수동모드 진행여부가 판별되고 나면 단지 요 지령 모드, 자동 모드의 진행여부가 판별되며, 어떠한 조건도 해당되지 않으면 요 운동은 수행되지 않는다. Fig. 5(a)의 순서도에 의해 요 모드가 결정되고 나면 요 제어기에서 풍향과 나셀 방향각 정보로 계산된 요 오차 값과 하달된 요 지령 값에 의해 다음 요 운동 상태를 계산한다. Fig. 5(b)는 Fig. 4(a)의 상세도를 나타낸다. Fig. 5(a)의 순서도를 MATLAB/Simulink의 조건문 블록을 이용하여 구현하였으며, 요 오차의 연산과 자동 요 제어 알고리즘 및 요 활성화 알고리즘을 포함한다.
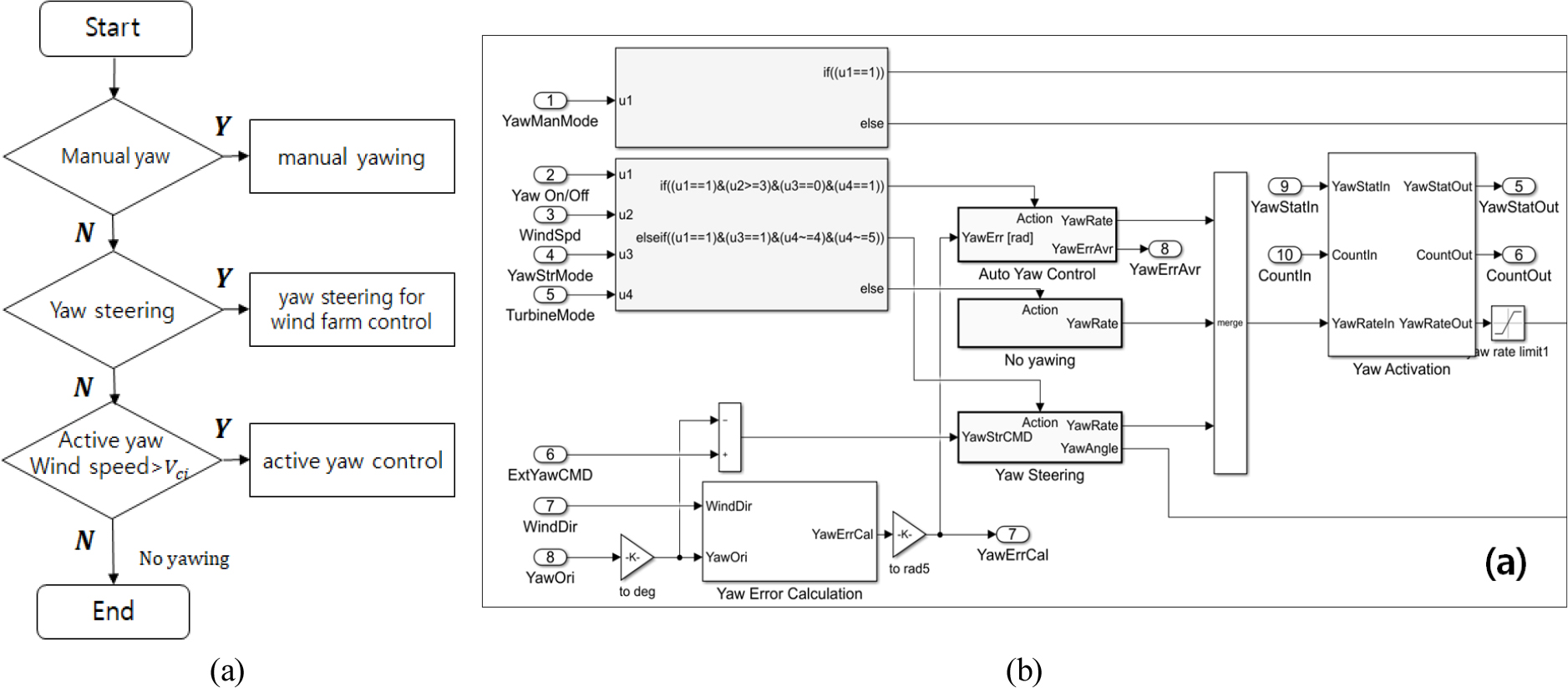
Fig. 6은 Fig. 5(b)에서 자동 요 제어 알고리즘 및 요 활성화 알고리즘의 순서도를 나타낸다. Fig. 6의 요 제어 알고리즘에서 요 오차를 입력 받지만, 측정된 값을 그대로 사용하기에는 바람의 난류 성분 때문에 요 운동 횟수를 줄여야하는 목적에서 부적절하다. 따라서 저역통과 필터 및 이동평균 필터를 사용하여 피드백 받은 요 오차 신호를 사용하게 된다. 이 때 사용된 저역통과 필터는 차수가 1차이며, 시상수가 1초인 필터를 사용하였다3). 이동평균의 시간은 1분으로 선정하여 적용하였다. 또한 요 오차의 허용범위는 8°로 선정하여 평균된 요 오차 신호가 8°가 넘는 경우에만 요 제어가 수행된다.

본 연구에서 요 운동 횟수를 줄이기 위한 방안으로 데드 존 및 요 활성화 알고리즘이 이용되었다. 데드 존은 MATLAB/Simulink에서 블록의 형태로 0을 기준으로 하여 입력 값에 따라 양, 음의 지정된 영역에서 ‘0’ 값을 출력시키는 기능을 지원한다. 요 활성화 알고리즘의 경우 요가 사용된 상태를 판별하여 요 운동이 한 번 일어난 후에는 특정 시간이 카운팅되기 까지 요 운동이 수행되지 않도록 구현되었으며, 카운팅 시간은 1분 단위로 적용되었다. 제어 샘플링 시간은 0.01초가 적용되었으므로 한 번 요 운동이 수행된 후에는 6000 스텝의 카운팅이 수행될 동안 요 운동은 수행되지 않게 된다.
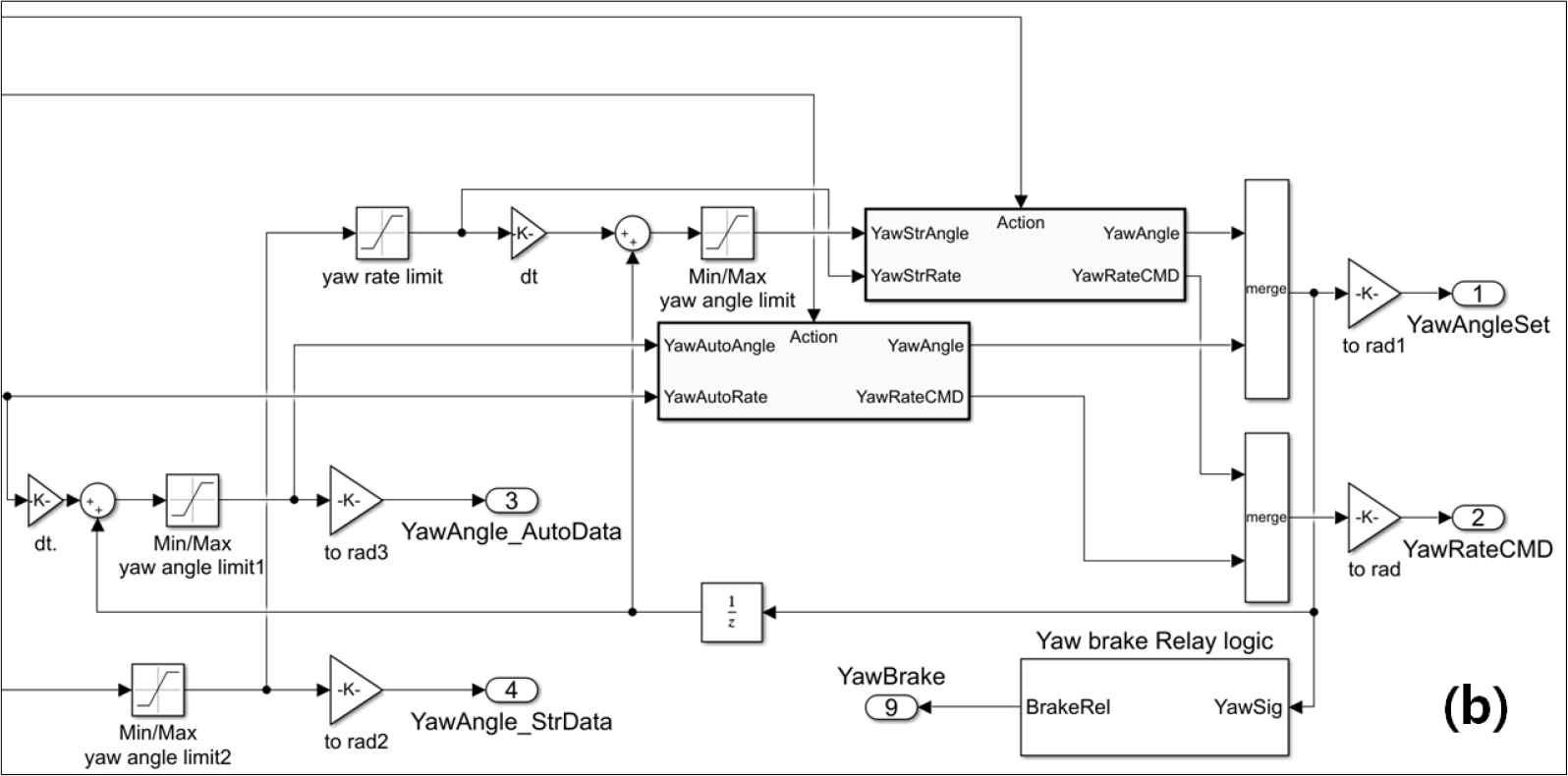
Fig. 7은 Fig. 4(b)를 확대한 그림을 나타낸다. Fig. 4(a)에서 계산된 요 지령 값과 이전 제어 스텝의 요 지령 값, 그리고 이산 영역에서의 미적분 관계를 이용하여 정상 작동 중에 어떠한 모드변환이 있더라도 자연스러운 요 운동을 할 수 있도록 요 운동 속도(yaw rate)와 요 각(yaw set-point)에 대한 지령이 계산되어 최종적으로 출력된다. 이 때, 요 운동속도와 요 각 지령에는 2장에서 분석한 하중 발생 정보를 기반으로 선정된 제한 범위가 적용되었다.
최종적으로 설계된 제어기는 MATLAB 프로그램의 Code Generation 기능을 이용하여 C 코드 형태로 변환하게 되며, 헤더 파일의 형태로 PLC (Programmerble Logic Controller) 등에서 불러와 사용될 수 있다. 본 연구에서는 설계된 제어기를 Bladed 프로그램에서 외부제어기로 사용하기 위해 DLL (Dynamic Linking Library) 파일로 변환하여 적용되었다.
4. 시뮬레이션 결과 분석
본 연구에서는 요 모드의 변화 과정을 관찰하기 위해 Bladed 프로그램을 이용하여 동적 시뮬레이션을 1000초간 수행하였다. 바람 조건은 12 m/s의 Kaimal 난류 스펙트럼에 의해 형성된 바람 장을 이용하여 약 20%의 난류강도가 적용되었다. 이러한 바람 조건은 서론에서 소개되었던 제어 전략이 달라지는 정격 풍속 구간으로서, 풍속이 높은 구간과 낮은 구간의 상황을 모두 확인할 수 있다. 또한 요 제어 알고리즘의 추종 성능을 쉽게 파악하기 위해 주 풍향이 0°에서 –35°로 변하는 상황이 시뮬레이션 되었다. 난류바람조건에서, 단지 요 지령 변화에 따라 풍력터빈에 미치는 영향을 비교 분석하기 위해 20°의 요 오차를 발생시키는 단지 제어 지령이 하달된 요 제어기(Steering 1)와 10°의 요 오차를 발생시키는 단지 제어 지령이 하달된 요 제어기(Steering 2), 그리고 단순 요 자동제어기(No steering)가 비교 되었다.
Fig. 8은 시뮬레이션 결과의 요 제어와 관련된 상태들을 보여주며, 풍향, 나셀 방향각, 요 오차, 단지 요 지령 모드, 요 지령 각도 값, 요 운동 속도의 상태를 나타내었다. 정상 작동 중에 단지 제어기로부터 요 지령이 하달된 상황 및 단지 요 지령을 추종하다가 다시 정상 작동으로 복귀하는 상황에 대하여 시뮬레이션을 수행하기 위해 본 시뮬레이션에서는 150초에서 350초 사이 및 800초 이후, 두 번의 단지 요 제어 지령이 하달되었다. 150초에서 단지 요 지령이 하달되자, Steering 1제어기와 Steering 2제어기가 각자 목표로 하는 요 지령(20°, 10°)을 추종하기 위해 제어되고 있는 것을 Fig. 8을 통하여 확인할 수 있다. 350초 이후에 단지 요 지령이 중단되자, 추종 중이던 요 지점에서 다시 요 자동제어모드로 복귀되어 주 풍향 변화에 대해 요 오차를 줄이기 위한 제어가 수행되고 있는 것을 알 수 있다. 이러한 자동 요 제어 중에 800부근에서 두 번째 단지 요 지령이 하달되었으며, Steering 1제어기와 Steering 2제어기는 각자 목표로 하는 요 지령(20°, 10°)을 추종하기 위해 제어되고 있는 것을 확인할 수 있다.
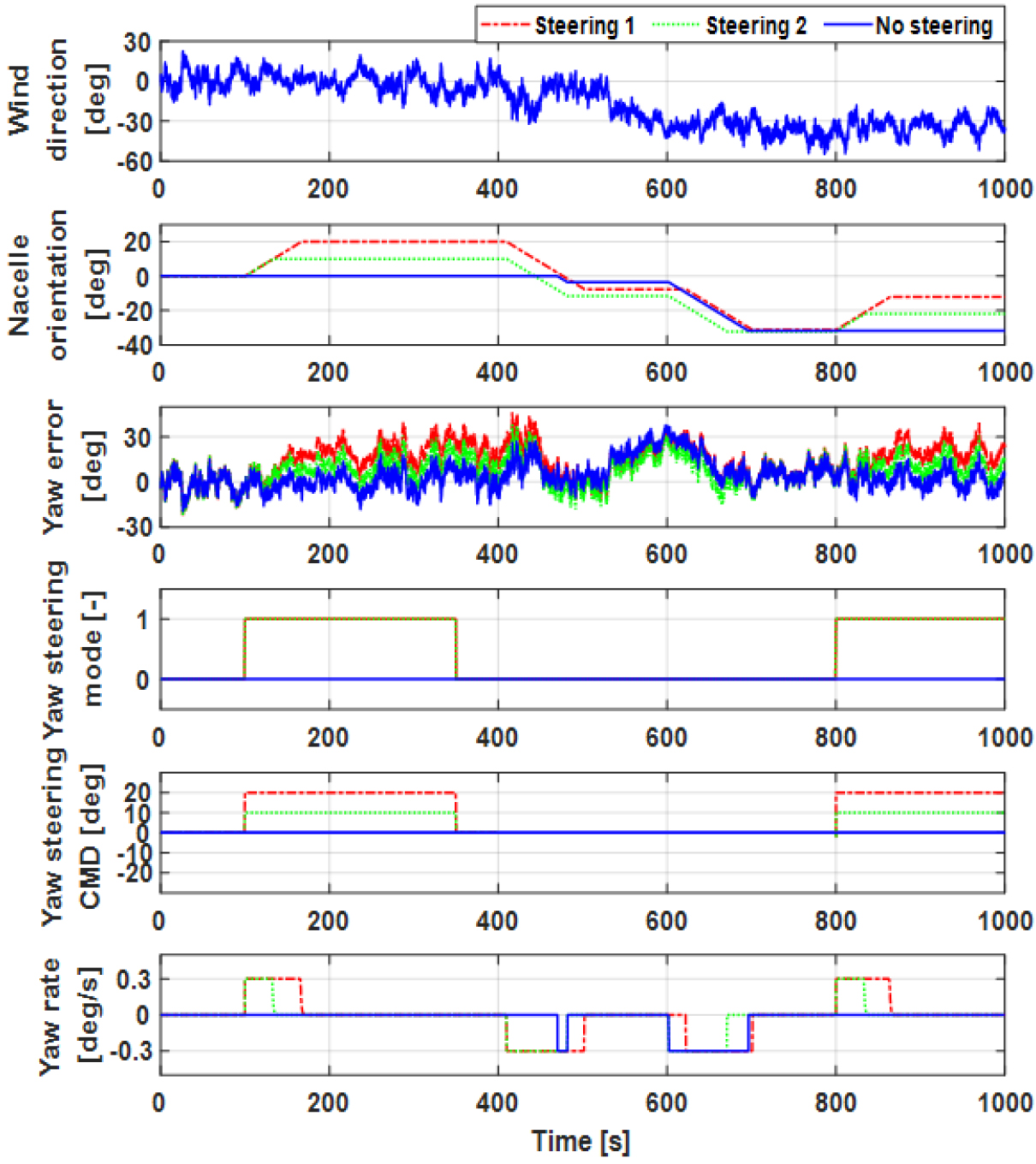
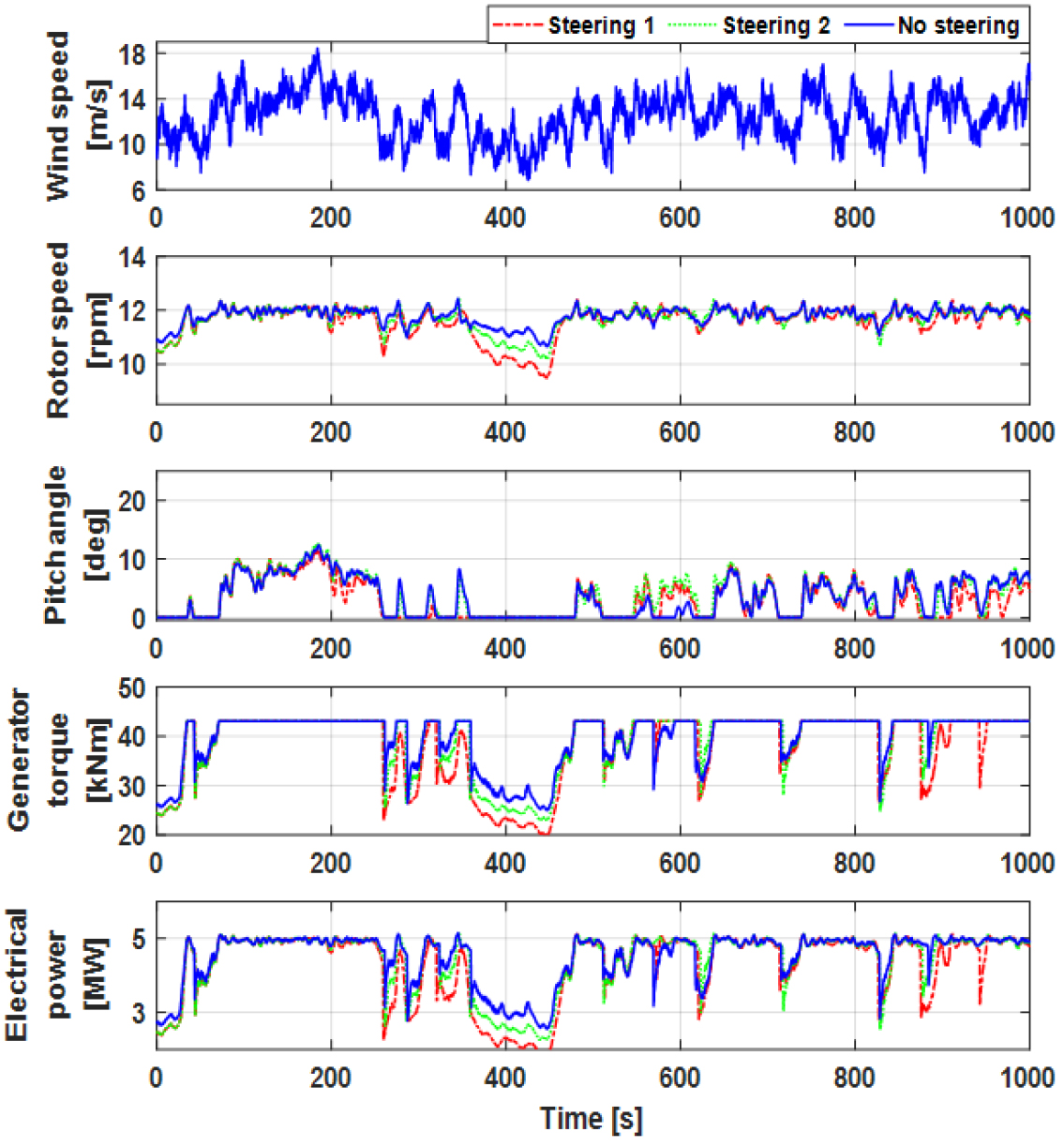
Fig. 9는 시뮬레이션 결과의 출력 제어와 관련된 상태들을 보여주며, 풍속, 회전속도, 블레이드 피치 각, 발전기 토크, 발전기 출력을 나타내었다. Fig. 9을 통하여 단지 요 지령을 추종함에 따라서 출력제어와 관련된 상태들의 변화를 확인할 수 있다. 그림에서 살펴보면, 150초에서 350초 사이 및 800초 이후 구간에서는 단지제어기의 요 지령을 추종함에 따라서 발생한 요 오차로 인하여 풍력터빈의 회전속도와 출력이 감소된 것을 확인할 수 있다. 하지만 800초 이후 구간에서의 정격 이상인 부근에서는 출력제어에 의해 블레이드 피치 각을 적게 사용하여 회전속도와 출력 저하 현상을 감소시킨 것을 알 수 있으며, 요 오차 발생에 의한 직접적인 영향은 정격 및 정격 이하 풍속 구간에서 주로 발생한 것을 알 수 있다. 회전속도와 출력 저하 현상은 요 지령 추종제어를 수행하지 않는 600초 부근에서도 다소 발생하였는데, 이는 시간 평균된 요 오차를 입력으로 받아 요 지령을 계산하는 요 제어 알고리즘에서 유래된 것이다. 하달된 요 지령(20°, 10°)에 의해 제어기에 입력되는 요 오차 평균값은 각 제어기 마다 다르게 되고, 이에 따라 요 운동 정도가 다르게 나오는 것을 Fig. 8의 요 운동 속도에서 확인할 수 있다.
5. 결 론
본 연구에서는 단지 제어기로부터의 요 지령을 추종하기 위한 요 제어 알고리즘을 설계하고 시뮬레이션을 통해 설계된 요 제어 알고리즘의 추종 성능을 검증하였다. NREL 5MW 풍력터빈을 대상 풍력터빈으로 하여, 기본적인 운영제어 알고리즘과, 출력제어를 위한 토크 및 피치제어 알고리즘, 그리고 문헌에 제시된 이동평균필터를 적용한 요 제어알고리즘을 적용하였다. 본 연구를 통해 새롭게 개발된 요 지령 추종제어 알고리즘은 풍력발전단지 제어 알고리즘과 자연스럽게 연동되어 작동될 수 있도록 요 운영모드를 결정하는 알고리즘을 설계하여 적용하였다.
단지 요 지령 모드의 제어 알고리즘을 검증하기 위해 제어알고리즘은 외부 제어기인 DLL 파일로 구현되어, Bladed 프로그램으로, 단지 제어기로부터 요 지령을 하달 받은 상황에 대한 시뮬레이션을 수행하였다. 요 지령 제어를 수행한 Steering 1, Steering 2 제어기 모두 정상 작동 중에 단지 제어기로부터 오는 요 제어 지령(20°, 10°)을 과도현상이나 진동과 같은 문제없이 추종하는 것을 확인하였으며, 요 지령 제어가 중단된 이후에는 자동 요 제어 모드로 자연스럽게 전환되는 것을 확인하였다.
결과적으로 풍력단지제어를 수행하기 위한 요 지령 추종제어 알고리즘의 추종 성능 및 적용 가능성은 동적 시뮬레이션 결과를 통하여 검증되었다. 본 연구를 통해 개발된 요 지령 추종제어 알고리즘은 단지 시뮬레이션 프로그램 내 풍력터빈 모델에 적용하여, 시뮬레이션을 통한 단지 제어 알고리즘 검증에 사용될 수 있을 것으로 판단된다.
