

1. 서 론
풍력발전기의 대형화에 따라 풍력발전기의 허브높이 역시 증가하고 있다. 현재는 허브높이 100 m 이상의 대용량 풍력발전기가 점차 대중화되어 가고 있다1,2). 풍력자원평가를 위해서는 풍력발전기 허브높이에서의 바람 데이터 취득이 필요하다. 기존의 일반적인 바
람 데이터 취득방법은 기상탑에 설치된 바람 센서(wind sensor)를 통해 직접적으로 풍속, 풍향을 측정하는 방식이었다. 하지만 기상탑 높이를 높이기 위하여 해결해야 할 기술적, 경제적 어려움 때문에 현재는 그 대안으로 라이다(LiDAR, Light Detection And Ranging)가 주목받고 있다3,4,5).
기존 연구결과에 따르면, 라이다의 측정 정확도가 상당히 높다고 알려져 있으며, 실제로 유럽에서는 풍력자원평가 및 출력성능평가 시 IEC (International Electrotechnical Commission) 표준에 적합한 측정 장비로서 라이다를 사용하기 위해 다양한 검증 연구들이 진행되고 있다6,7). 그 중에 몇 가지 연구사례를 소개하면, Kindler 등8)은 아일랜드해, 북해 등에서 라이다와 기상탑의 해상 바람 측정 캠페인을 실시하였다. 그 결과, 기상탑과 라이다 측정 10분 평균 풍속에 대한 상관관계 분석에서 결정계수(coefficient of determination, R2)가 모든 높이에서 0.98 이상이었으며, 선형회귀선(linear regression line)의 기울기는 0.98~1.02를 보여 라이다 검증기준을 만족하였다. 김대영 등9)은 복잡지형에서 취득된 지상기반 라이다 데이터의 검증 연구를 진행하였다. 지형복잡도가 다른 제주도의 측정 사이트 3곳(수망, 강정, 수산)을 선정하였고, 인근의 기상탑에서 취득된 바람 데이터와 상호 비교하였다. 지형복잡지수인 RIX (Ruggedness Index) 분석 결과, 수망 2.91%, 강정 0.00%, 수산 2.05%였으며, 10분 평균 풍속에 대한 라이다 측정 평균 오차율은 수망 6.02%, 강정 2.23%, 수산 4.75%를 나타냈다. 따라서 RIX값이 높을수록 라이다 측정오차율이 높게 나타남을 보였고 지형복잡도가 실제 라이다 오차에 영향을 미치고 있음을 확인하였다.
현재까지 알려진 지상기반 라이다 측정오차 관련 연구들은 단순히 라이다와 기상탑 취득 데이터 간의 비교·검증 연구였다. 측정오차가 어떤 요인들로 인하여 발생하였는지를 분석하는 연구는 그동안 별로 이루어지지 않았다. 또한 유럽의 평탄지형과는 달리 우리나라와 같이 지형복잡도가 높은 지역의 경우 라이다의 측정오차가 높다고 보고되고 있으므로 측정오차에 영향을 미치는 요인을 파악하고 오차를 줄일 수 있는 방안을 마련하는 것이 시급하다
본 연구의 목적은 지상기반 라이다의 풍속 측정오차에 영향을 미치는 요인을 파악하는 것이다. 이를 위해 바람의 특성을 나타내는 여러 요소 중 유동경사각(inclined angle), 난류강도(turbulence intensity), 풍속전단(wind shear), 이렇게 세 가지 요인을 고려하였다. 제주도 내 풍력실증 사이트에서 지상기반 라이다를 기상탑 인근에 설치하여 바람측정을 실시하였고, 취득된 데이터를 활용하여 위 세 가지 요인이 실제 라이다 측정오차에 어떠한 영향을 미치는지 분석하였다.
2. 사이트 및 바람데이터
Fig. 1은 본 연구의 대상 사이트인 김녕 국가풍력발전 실증연구단지를 보여준다. 이 실증단지는 제주도 북동부 해안지역에 위치하고 있으며, 국내 대형풍력발전기용 성능시험을 위해 지난 2014년 개발 완료되었다. 실증단지에는 허브높이 100 m인 현대중공업 5.5 MW 풍력발전기(HQ 5500)와 효성중공업 5 MW 풍력발전기(HS 139)가 각각 1기가 설치되어 운전 중이며 기상탑과 풍력발전기 사이의 이격거리는 각각 312, 478 m이다10,11). 연구를 위해 실증단지 기상탑 인근에 지상기반 라이다를 설치하여 바람데이터를 수집하였다. Table 1은 사이트 및 측정 조건을 보여준다.
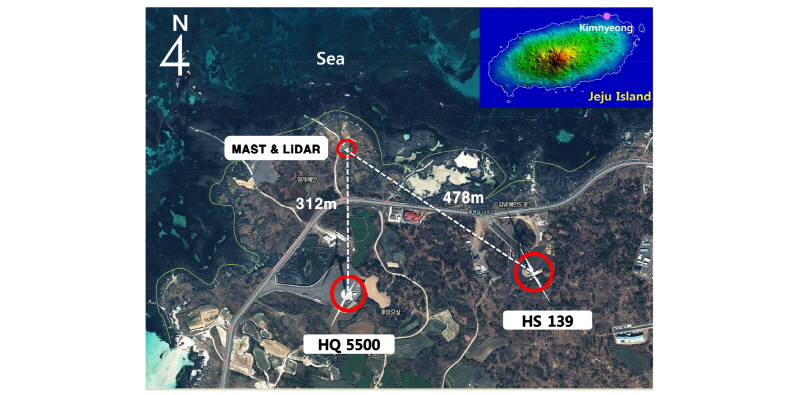
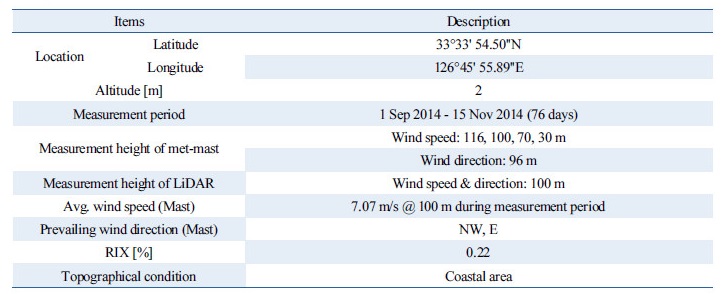
기상탑과 라이다의 동기간 측정기간은 2014년 9월 1일부터 11월 15일까지 총 76일간이다. 데이터의 상호비교를 위해 동일 높이 100 m를 기준으로 비교, 분석 하였으며, 10분 평균값을 사용하였다. 100 m와 96 m 높이에서의 풍향은 거의 변화가 없다고 판단되어, 100 m 높이 풍향 데이터 분석 시 96 m 높이의 데이터를 사용하였다. 또한, 풍속전단 분석을 위해 기상탑의 100 m 높이 이외에도 30, 70, 116 m 높이의 풍속 데이터를 활용하였다. 측정기간 동안의 평균풍속은 기상탑 100 m 높이 기준 7.07 m/s였으며, 주풍향은 북서풍(NW) 및 동풍(E)이었다. 한편, 해당 사이트의 지형 복잡도는 WAsP (Wind Atlas Analysis and Application Program) S/W의 RIX 분석 결과 0.22%로 본 사이트는 매우 평탄한 지형임을 확인하였다. 연구에 사용된 지상기반 라이다는 프랑스 Leosphere 사(社)의 WindCube v2 제품이며, Fig. 2는 측정 중인 실제 지상기반 라이다를 보여준다.

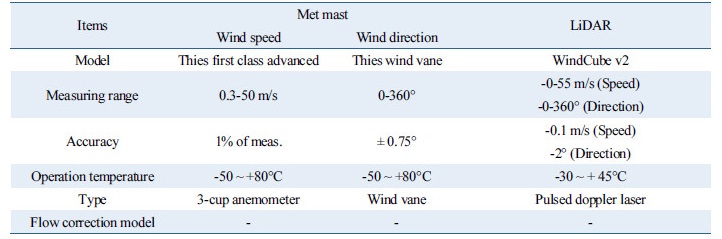
WindCube v2는 펄스형 도플러 레이저(pulsed doppler laser) 기술을 기반으로 하며, 수직으로 1개, 28도 원뿔각(cone angle)을 사방으로 4개, 총 5개의 빔을 사용한다. 지상으로부터 40 m에서 290 m 높이까지 측정 가능하며, 측정높이는 총 12개까지 설정 할 수 있다. 데이터 샘플링 간격은 1초이고, 측정 풍속범위는 0∼55 m/s이다. 기상탑 측정센서 및 지상기반 라이다의 자세한 사양은 Table 2와 같다12,13). 지형 복잡도가 높은 지형에서 라이다에 의해 측정된 바람의 경우 유동 보정 모델(flow correction model)을 적용함으로서 풍속 측정오차를 줄일 수 있다. 해당 지상기반 라이다는 유동 보정 모델로서 FCR(Flow Complexity Recognition) 모듈을 지원한다. 하지만 본 논문에서 사용된 지상기반 라이다는 FCR 모듈이 지원되지 않은 장비이다.
3. 데이터 필터링 적용
기상탑과 지상기반 라이다의 바람데이터는 시간 동기화를 통해 하나의 시간열 데이터로 통합하였다. 그리고 데이터의 신뢰성을 높이기 위해 비정상적이라 판단되는 데이터를 제외하였으며, 그 제외 기준은 다음과 같다12,14,15,16).
- 4~16 m/s 풍속 범위 이외의 데이터
- 라이다 CNR (Carrier to Noise Ratio) 값이 -23 dB 이하인 데이터
- 라이다 데이터 가용률(data availability)이 80% 미만인 데이터
- 강우량이 10 mm 이상일 때의 데이터
- 기상탑의 타워 쉐도잉(tower shadowing)으로 인해 유동 왜곡이 발생된 데이터
기상탑 또는 라이다 중 어느 하나가 위에 기준에 해당하면 그에 해당하는 특정 시간대의 기상탑 및 라이다 데이터를 모두 제외하였다. 필터링 전 데이터 수는 100, 96 m 높이 모두 10,944개였으나, 필터링 후에는 7,132개로 34.8% 감소하였다. 한편, 풍력발전기 후류영향을 받는 데이터는 따로 필터링 하지 않고 분석에 사용하였다. 그 이유는 후류에 의한 불안정한 바람의 경우 지상기반 라이다의 측정오차의 원인으로 판단되는 세 가지 요인(유동경사각, 난류강도, 풍속전단)이 큰 변동을 보이므로 다양한 범위의 데이터 확보가 가능하기 때문이다. IEC 61400-12-1 Annex A에서는 풍력발전기 후류 영향을 받는 왜곡 방위각(disturbed sector)을 규정하고 있는데,17) 이를 바탕으로 김녕 실증단지에 적용된 왜곡 방위각은 기상탑 기준 92-219°이며, 왜곡 방위각 내 후류영향을 받는 데이터 수는 1,411개로 전체 분석 데이터의 19.8%에 해당한다.
4. 라이다 측정오차 분석
4.1 라이다 측정오차율
본 연구의 목표인 지상기반 라이다 측정오차에 영향을 미치는 요인을 분석하기 위해서는 먼저 라이다의 실제 측정오차를 계산하여야 한다. 기상탑에서 측정된 동시간 데이터를 참값으로 가정하였고, 이를 기준으로 다음 식(1)과 같은 라이다의 상대오차율(relative error rate)을 계산하였다9,18).
 (1)
(1)
위 식에서 라이다 측정값이 기상탑 측정값보다 큰 경우 양의 값을 갖는 오차율이 나오지만, 반대로 라이다 측정값이 기상탑 측정값보다 작은 경우 음의 오차율이 나오게 된다. 그러므로 기상탑 대비 라이다 측정값의 상대적인 대소 유무를 쉽게 파악할 수 있다. 하지만 특정 빈(bin) 구간에서의 평균 오차율을 계산할 때 구간 내 양과 음의 오차 값이 서로 상쇄되어 실제 절대 크기의 오차율을 계산하기에는 한계가 있다. 이를 해결하기 위해 식(1)에 절댓값을 취한 절대 라이다 측정오차율(absolute LiDAR error rate)을 위 측정오차율과 함께 병행하여 사용하였다.
참고로 본 연구와 동일한 데이터를 사용하여 라이다 측정오차를 분석한 기존 연구에 따르면, 측정 방위각(mea-surement sector) 내 절대 라이다 측정오차율이 100 m 높이에서 평균 4.85%(표준편차: 4.75%)로 나타났다18).
4.2 라이다 측정오차에 영향을 미치는 요인 분석
본 연구에서는 바람의 특성을 나타내는 여러 요소 중 라이다 측정오차에 영향을 미치는 요인으로 유동경사각, 난류강도, 풍속전단, 이렇게 총 세 가지 바람특성을 고려하였다. 또한, 각 바람특성이 라이다 측정오차와 어떤 상관성을 보이는지 분석하기 위하여 바람특성별 라이다 측정오차의 경향을 분석하였다.
(1) 유동경사각(inclined angle)에 따른 라이다 측정오차
Fig. 3과 같이 유동경사각은 공기흐름(기류, airflow)과 수평면 사이의 각도를 의미한다. 참고로, IEC 61400-1 표준에서는 유동경사각이 수평면 기준 최대 ±8을 초과하면 안 된다고 규정하고 있다19). 바람의 유동경사각을 계산하기 위해서는 풍속의 수직, 수평성분 값이 필요하며, 식(2)에 의해 계산된다20).

 (2)
(2)
여기서 W는 풍속의 수직성분, U는 풍속의 수평성분이다.
본 연구에서 계산된 유동경사각은 지상기반 라이다 데이터로부터 계산되었다. 기상탑 컵형 풍속계는 풍속의 수평성분만 측정 가능하므로 이로부터 유동경사각을 구할 수 없다. 하지만 라이다는 풍속의 벡터량을 측정하며 이로부터 수평, 수직성분을 추출하여 기록하므로 이를 통해 유동경사각을 계산할 수 있다. 유동경사각과 라이다 측정오차는 기상탑 및 라이다에서 취득된 지상 100 m 높이, 동시간 10분 데이터를 활용하여 계산하였다.
Fig. 4는 100 m 높이에서 유동경사각에 따른 라이다 측정오차율 분포를 나타낸다. 유동경사각 1도를 빈 간격으로 설정하여 오차막대를 표시하였다. 오차막대(error bar)의 중간점은 빈 구간 내 측정오차의 평균값이며, 오차막대의 길이는 측정오차의 단일 표준편차(one standard deviation)이다. 한편, 빈 구간 내 데이터 수가 10개 미만인 경우에는 표시하지 않았다. 그 이유는 정규분포 적합도 검정(Kolmogorov-Smirnov 검정, 유의수준 0.05) 결과 전체 라이다 측정오차 데이터(7,132개)가 정규분포를 이루고 있음을 확인하였고, 각 빈 구간에 들어가는 표본 역시 정규분포를 이루어야 한다는 가정 하에 최소 표본 수를 정하였기 때문이다. 그 결과, 최소 10개 이상의 표본이 정규분포임을 확인하였다. 그림에서 보이듯이 유동경사각이 음 또는 양의 값으로 증가할수록 오차율의 분포범위가 넓어지고 있음을 확인할 수 있다. 그리고 이에 따라 오차막대의 단일 표준편차 역시 증가하는 경향을 보인다. 한편, 음의 유동경사각은 라이다 측정오차가 음의 값을 보이며, 양의 유동경사각의 경우 라이다 측정오차가 양의 값을 보였다. 이는 음의 유동경사각에서 라이다 풍속 측정값이 기상탑보다 낮음을 의미하며, 반대로 양의 유동경사각의 경우 라이다 풍속 측정값이 기상탑보다 높음을 의미한다. 라이다 측정오차율은 평균값 기준 -5.48~6.21%, 표준편차 기준 3.03~9.04%의 범위를 보인다.
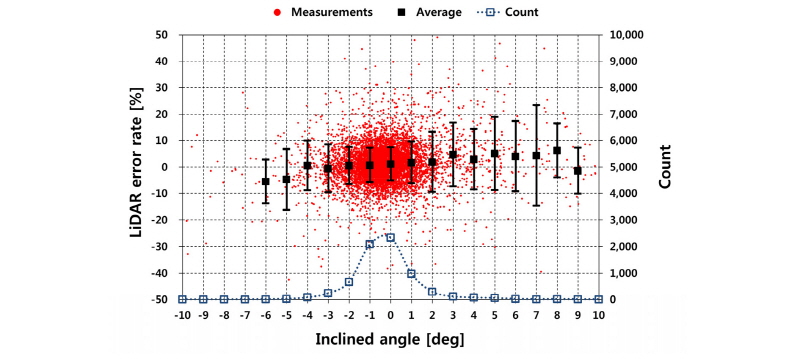
Fig. 5는 절대 유동경사각과 절대 라이다 측정오차율의 상관관계를 나타낸 그림이다. 빈 간격은 0.5도이다. 여기서 절대 유동경사각을 고려한 이유는 양과 음으로 표시되는 각도의 방향을 고려치 않은 경사각 자체의 크기만을 고려하기 위함이다. 또한, 둘 사이의 상관관계를 분석하기 위해 선형회귀분석을 수행하였으며, 그에 따른 결정계수(R2)를 표시하였다. 그림에서 확인할 수 있듯이 절대 유동경사각이 증가할수록 절대 라이다 측정오차율의 평균값 역시 증가하고 있으며, R2 값은 0.77 (R=0.88)로 높은 상관관계를 보이고 있다. 한편, 절대 라이다 측정오차율은 평균값 기준 4.58~13.40%, 표준편차 기준 4.45~13.63%의 범위를 보인다.
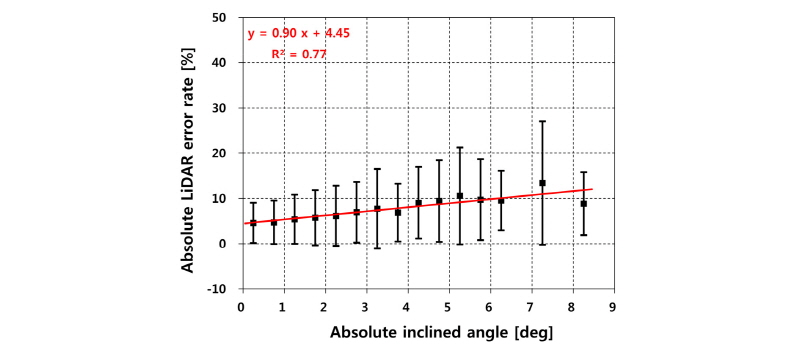
유동경사각이 증가함에 따라 라이다 측정오차가 증가하는 이유는 지상기반 라이다는 검사 체적(control volume) 내 바람이 수평 유동 균일(horizontal flow uniformity)하다는 가정 하에 3D 풍속 벡터를 유추하기 때문이다21). 그러나 실제 바람의 경우 수직 풍속벡터의 수평 구배(horizontal gradient)가 발생할 수 있으며, 이는 라이다의 풍속 측정 오차를 발생시키는 요인 중 하나이다22,23). 유동경사각이 수직 풍속벡터의 수평 구배를 일으키는 원인이라 판단되며, 유동경사각이 큰 바람일수록 측정오차 역시 증가할 것으로 예상된다.
한편, 이 연구에서는 유동경사각을 구하기 위해 라이다에서 측정된 수평, 수직 풍속 값을 사용하였다. 이 값들을 참값으로 가정하여 유동경사각을 추정하였으나 정확한 유동경사각을 산출하기 위해서는 이에 대한 불확도 평가가 수반되어야 한다. 특히 수직 풍속성분인 W에 대한 불확도 평가가 필수적이다. 보다 정확한 분석을 위해서는 참조 기상탑에 수직 풍속계(vertical anemometer)나 초음파 풍속계 등 W 성분을 측정할 수 있는 관련 장비를 설치하고 이에 대한 불확도를 분석할 필요가 있다.
(2) 난류강도(Turbulence intensity)에 따른 라이다 측정오차
IEC 풍력발전기 클래스를 결정하는 중요한 요소 중 하나인 난류강도(TI)는20) 평균풍속에 대한 표준편차로 정의되며, 다음 식으로 계산 된다24,25).
 (3)
(3)
여기서, σ는 풍속의 표준편차,  는 평균풍속이다.
는 평균풍속이다.
Fig. 6은 난류강도에 따른 라이다 측정오차율의 분포를 나타낸다. 난류강도는 기상탑의 100 m 높이 데이터를 사용하여 구하였으며, 빈 간격은 2%이다. 난류강도가 증가할수록 오차막대의 단일 표준편차가 크게 증가하고 있다. 한편, 라이다 측정오차율은 평균값 기준 -1.06~14.78%, 표준편차 기준 4.68~27.64%의 범위를 나타냈다.
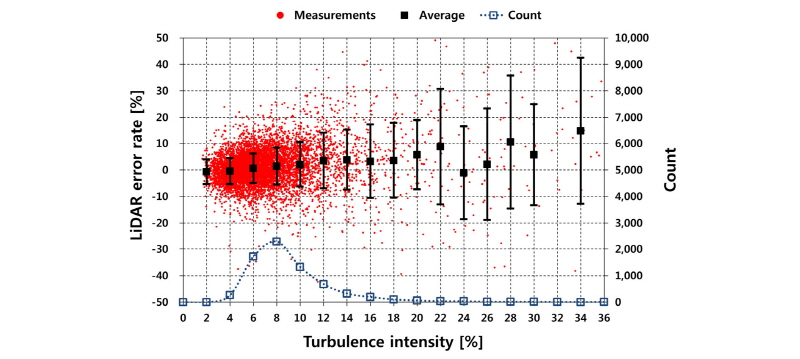
Fig. 7은 난류강도와 절대 라이다 측정오차율의 상관관계를 나타낸 그림이다. 빈 간격의 경우 2%로 Fig. 6와 동일하다. 난류강도가 증가할수록 절대 라이다 측정오차율의 평균값은 물론 단일 표준편차 역시 뚜렷하게 증가하고 있다. 그리고 R2 값은 0.93 (R=0.96)으로서 매우 높은 상관관계를 보이고 있다. 절대 라이다 측정오차율은 평균값 기준 3.58~23.94%, 표준편차 기준 3.08~19.24%의 범위를 나타냈다.
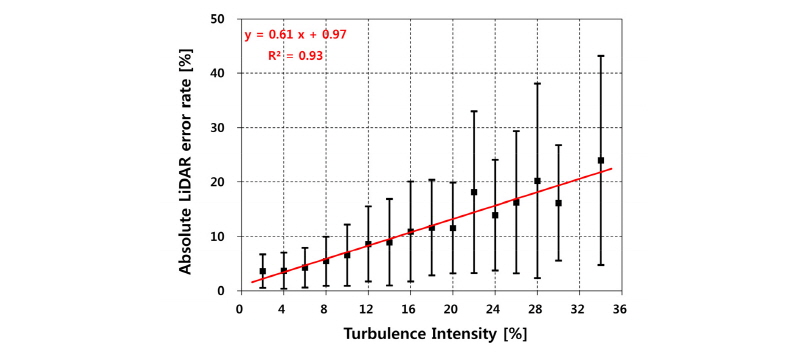
난류가 심한 바람일수록 풍속의 변화가 심한데 이는 라이다 측정 시 바람은 수평 유동 균일하다는 가정을 부정하게 되며, 이는 앞의 유동경사각 경우와 마찬가지로 라이다의 측정오차로 이어지게 된다. 그러므로 난류강도가 심할수록 라이다 측정오차가 증가하는 것으로 생각된다.
(3) 풍속전단(Wind shear)에 따른 라이다 측정오차
풍속전단은 고도에 따른 풍속변화를 의미한다. 현대 풍력발전기의 높이가 높아짐에 따라 풍속전단에 대한 연구의 필요성이 중요해지고 있다. 비용 및 기술적인 문제로 기상탑을 이용한 풍속은 주로 풍력발전기의 허브 높이보다 낮은 높이에서 측정이 되므로 이를 해결하기 위해 풍속의 보정(extrapolation)이 필요하다. 풍속을 보정하는 방법으로는 멱법칙(power law)이 많이 사용되며, 그 식은 다음과 같다24,25).
 (4)
(4)
여기서 V(z1), V(z2)은 지표면으로부터의 높이 z1 및 z2에서의 풍속이며, α는 멱지수이다.
Fig. 8은 멱지수에 따른 라이다 측정오차율의 분포를 나타낸다. 멱지수는 기상탑의 30, 70, 100, 116 m 높이 풍속 데이터를 활용하여 10분 평균값을 계산하였고, 이를 동시간대의 라이다 측정오차율과 서로 비교하였다. 그림에서 멱지수 기준 빈 간격은 0.05이다. 유동경사각 및 난류강도와는 달리 멱지수 변화에 따른 측정오차의 변화는 크지 않다. 라이다 측정오차율은 평균값 기준 -0.96~4.54%, 표준편차 기준 6.61~13.07%의 범위를 나타냈다.
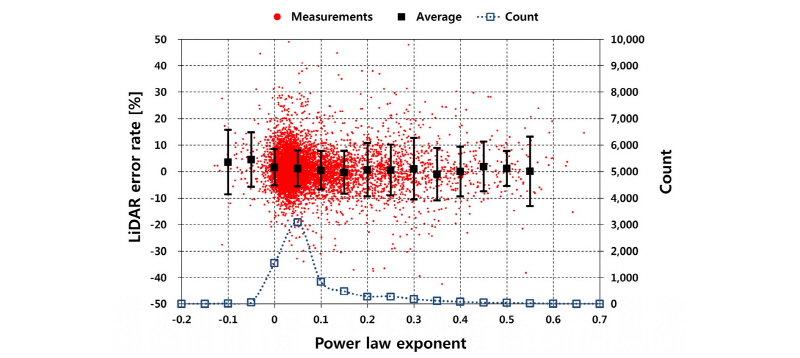
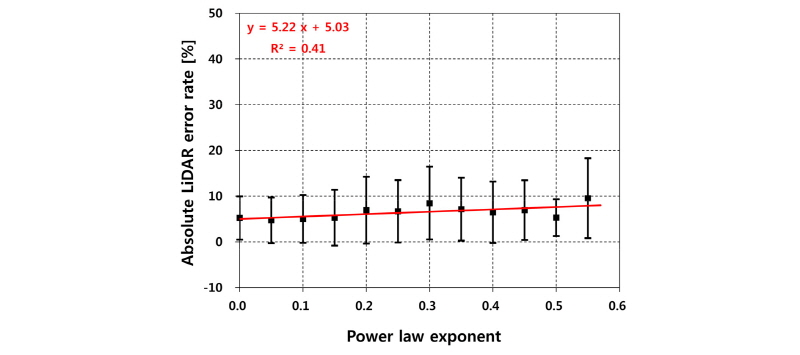
Fig. 9는 멱지수에 대한 절대 라이다 측정오차율의 상관관계를 보여준다. 빈 간격은 0.05이다. 멱지수가 증가할수록 절대 라이다 측정오차율의 평균값은 대체적으로 증가하는 경향을 보이나 표준편차의 경우 큰 변화가 보이지 않는다. 분석 결과 R2 값은 0.41(R=0.64)로서 멱지수와 절대 라이다 측정오차율 간 높은 상관관계는 보이지 않았으나 어느 정도의 상관성은 있다고 판단된다. 절대 라이다 측정오차율은 평균값 기준 4.71~9.53%, 표준편차 기준 4.04~8.73%의 범위를 나타냈다.
풍속을 측정하기 위하여 기상탑 컵형 풍속계는 해당 높이에서 한 지점(point)의 풍속만을 측정하는 데 반하여 라이다는 대기 중 검사 체적 내 미세입자들의 속도를 측정하며 후에 이를 평균화 시켜 해당 높이에서의 풍속을 계산하게 된다3,5). 이러한 차이는 라이다의 측정오차를 불러일으킬 수 있다. 특히 높은 풍속전단을 보이는 대기층의 경우 라이다 검사 체적 내에서 높이에 따른 풍속 변화가 심하다5). 이 경우 체적 내 풍속을 평균화 한 라이다 측정값은 한 지점의 풍속만을 측정하는 컵형 풍속계의 값과 비교할 때 차이가 날 수 있다. 본 연구에서는 풍속전단과 라이다 측정오차 간에 높은 상관성은 보이지 않았다. 다양한 범위의 풍속전단을 분석한다면 상관성이 좋아질 것이라 생각되며, 향후에 기간(일, 계절)에 따른 풍속전단, 지면거칠기 및 대기안정도에 따른 풍속전단을 고려하는 등 추가연구를 통해 검증할 필요가 있다.
5. 결 론
본 연구에서는 지상기반 라이다 풍속 측정오차에 영향을 미치는 요인을 파악하였다. 라이다 측정오차에 영향을 미치는 요인으로는 유동경사각, 난류강도, 풍속전단을 고려하였으며, 이 바람특성들이 실제 라이다 측정오차에 어떠한 영향을 미치는지 분석하였고, 얻어진 결과는 다음과 같다.
(1) 유동경사각과 난류강도가 증가할수록 라이다 측정오차율이 증가하고 있음을 확인하였다. 라이다 측정오차율과의 선형회귀 분석 결과 유동경사각은 R2값이 0.77(R=0.88)이었으며, 난류강도는 0.93 (R= 0.96)으로서 매우 높은 상관관계를 보였다. 여기서 유동경사각은 라이다에서 측정된 수직 풍속 성분으로부터 분석된 결과로서 향후 이에 대한 불확도 평가를 수행할 필요가 있다.
(2) 풍속전단 멱지수가 증가할수록 라이다 측정오차율이 대체적으로 증가하지만 뚜렷한 경향이 보이지는 않았다. 멱지수와 라이다 측정오차율의 상관관계는 R2 값이 0.41 (R=0.64)이었다.
(3) 위의 세 가지 요인 중 유동경사각과 난류강도가 라이다 풍속 측정오차에 가장 큰 영향을 미치고 있으므로 라이다 운영자들은 유동경사각과 난류강도가 큰 바람 조건의 경우 풍속 데이터의 오차 보정이 필요하며, 이 때 본 연구에서 평가된 오차율을 참조할 수 있다.
